Adam Steltzner ja veel üks Curiosity meeskonna liige tähistavad edukat maandumist. Autor: NASA / Bill Ingalls.
Ma tunnistan, olen kaotanud mitu korda, kui ma olen jälginud, kuidas JPL-i suurepärast “treilerit”, kus näidati sündmusi missiooni juhtimisruumis, Curiosity roveri sisenemise, laskumise ja maandumise ajal, mis samal ajal pakub ka animatsioone mis toimus Marsil. Selle vaatamine kutsub tavaliselt esile 1.) rusikapumba või 2.) lämbumise.
Aga kui olete videot näinud või kui vaatasite maandumise ööd otseülekandena, siis mida kõik need akronüümid ja fraasid ümber visati ja mida need tähendasid? Ja mida kuulis tema kõrvaklappides alati vaevav Adam Steltzner (EDL-i meeskonna juht), mis pani ta peatama, ümber pöörama ja osutama vahetult enne seda, kui kosmoselaevade kommunikaator Allen Chen ütles: „Touchdown kinnitatud!“ … Kus tekkis voodilamm?
JPL on välja pannud teabe selle kohta, mis kõik kulisside taga toimus. Selgub, et sõnad “UHF Strong” olid meeskonna poolt väga oodatud, lisaks oli meeskonnas pisut akronüümikatke, nii et nende seas polnud kahtlustki, mis toimub.
Curiosity ELD meeskond oli arutanud selle üle, millised peaksid olema nende esimesed sõnad, mis näitavad, et rover oli pinnale jõudnud. Nad teadsid, et nende mikrofonid on kuumad ja NASA TV edastas maandumisüritust otseülekandena kõigile, kes seda vaatavad. *
DC Agle JPL-st räägib loo:
Kuid nad teadsid ka, et ohutu maandumine Marsile tähendab enamat kui lihtsalt maandumist Marsile - mida keegi JPL-i hoone 264 ruumis 230, mida tuntakse ka kui EDL-i sõjaruumist, 34-st insenerist ütleb teile, et pikalt pole üldse lihtne. Nende raketipõhine seljakott ja roverit langetav Sky Crane süsteem viisid oma esimese kõikvõistluse testi 154 miljoni miili (248 miljonit kilomeetrit) kodust eemale ja seal oli veel palju, mis võib valesti minna ka pärast seda, kui rover õrnalt asetati pind… palju.
Mis siis, kui laskumistaadium laskub otse roveri peal? Mis siis, kui neid ühendavad sillad ei eralduks? Mis siis, kui lendude manöövri mootorite drosseldamiseks kasutatav algoritm polnud täpne?
Allesjäänud „mis siis oleks“ tegi need, millest need esimesed sõnad Marsilt kinnitasid, et rover oli pinnal nii olulised.
"Kui me ütleksime" maandumine ", siis võiksid EDL-i mitte lähemalt tundvad inimesed järeldada, et uudishimu oli hea käia," ütles insener Steve Sell. "Kuid enne, kui sain uuesti hingama hakata, tuli teha veel kaks suurt kõnet."
Kell 10:31:45 p. PDT, Jody Davis nägi sündmuse salvestust ehk EVRi, mida ta otsis, et ta ilmuks oma arvutiekraanile EDL-i sõjaruumis. Ta teadis, et kosmoseregulaatori "maandumine" saab tala ainult siis, kui roveri laskumistaadium on alla lasknud - tulemus võib ilmneda ainult siis, kui laskumistaadium on poole oma massist maha laadinud. Ainus viis, kuidas rover saaks hetkega poole oma kaalust maha laadida, on see, kui seda hoitakse alt ülespoole.
Davis, EDL-i meeskonna liige ja NASA Langley uurimiskeskuse insener Virginias, esitas palju vaadatud, eelnevalt kirjutatud üleskutse - “Tango Delta nominal”.
Tango ja Delta on T ja D foneetilised identifikaatorid, mida meeskond kasutas puudutuse kuvamiseks.
Üks alla, kaks minekut, mõtles Sell. Järgmine kõne, mida EDL-i meeskond otsis, oli “RIMU stabiilne”.
“RIMU tähistab inertsiaalse mõõtmise seadet Rover,” ütles Sell. „RIMU annab meile nii roveri orientatsiooni kui ka kõik liigutused, mida see teeb. Kui maandume murenevale kraatriseinale või ebastabiilsele liivaluidele või kui meid lohistab veel ühendatud laskumisjärk üle pinna, näitab RIMU seda oma andmekogumis. ”
Sõjatoa JPL insener David Way jälgis selle üksuse jõudlust. Kaheksa pikka sekundit pärast Jody kõnet leidis ta otsitava EVR-i.
“RIMU stabiilne,” ütles Way.
Veel üks oluline verstapost.
Sellel pildil on Curiosity sisenemise, laskumise ja maandumise (EDL) sõjatuba ja selle töötajad. Öösel, 5. augustil 2012 PDT (6. augusti varahommik EDT), kogunesid 34 inseneri sellesse ruumi NASA reaktiivmootorite laboratooriumis Pasadenas, Californias, et toetada maandumist. Kujutise krediit: NASA / JPL-Caltech
Selle viimase kõne vastuvõtmata jätmine oleks kindel, et see on kaugel. Lõppude lõpuks oli rover maas ja RIMU teatas, et see ei liigu. Nende süsteemi on seni tõestatud igal sammul. Kuid EDL-i sõjaruumis pääsesid kõik kaugemale mitte ainult seetõttu, et nad olid suurepärased insenerid, vaid ka seetõttu, et nad olid ebasoovitavad tegema ebapiisavaid sisenemis-, laskumis- ja maandumisstsenaariume - ja mõeldes siis välja, kuidas neist mööda hiilida. Ja üks tonn kütusega koormatud, rakettidega tulistavat laskumistetappi ronides otse üles, et vaid langeda otse alla nende tehase värskele maandumisplatsile ja muidu hästi käidav, ringi liikuv Marsi labor oli stsenaariumi korral peaaegu sama ebaühtlane kui Müüa. võiks ette kujutada.
See lõplik kinnitus ei pärine Sell'i asukohast. Lõplik kinnitus, et Curiosity oli maandunud puhtaks, tuleb 200 jardi ja ühe hoone kaugusel EDL-i sõjaruumist. Seal JPL-i hoone 230 missiooni tugipiirkonnas vaatas missiooni EDL-etapi juht Adam Steltzner üle ruumi Brian Schwartzit, kes polnud kellegagi silmsidet võtnud. EDL-i kommunikatsiooniinsener Schwartz vaatas oma ekraani. Tema ülesanne polnud kontrollida roverilt heade uudiste EVR-i. Selle asemel ootas ta, kas UHF-signaal on katkendlik, tuhmunud või katkestas selle täielikult - kõik potentsiaalsed märgid selle kohta, et rover ja laskumise etapp pole läinud oma teed.
Kaheksa sekundit pärast RIMU kõnet - Schwartz vaatas üles.
"UHF tugev," ütles Schwartz.
Sellega olid Steltzneril kõik vajalikud andmed. Otse istuva EDL-faasijuhi ette istudes tundis Allen Chen õlga. Missiooni (kapselikommunikaator) Chen teadis, et see võib tähendada ainult ühte asja.
"Puudutamine kinnitati," ütles Chen.

Bedlam ja rõõm.

Marsi teaduslabori (MSL) riiki sisenemise, laskumise ja maandumise insener Adam Steltzner reageerib pärast seda, kui Curiosity rover maabus pühapäeval, 5. augustil 2012. Fotokrediit: (NASA / Bill Ingalls)
Steltner ütles Twitteri vahendusel ajakirjale Space Magazine, et kui näete teda videol nelja sõrme üles hoides, loendas ta tegelikult Brian Schwartzi UHF-i kinnitust ootavaid sekundeid. Arvan, et mu sõrmed olid mul loendamisega seotud, ”sõnas ta.
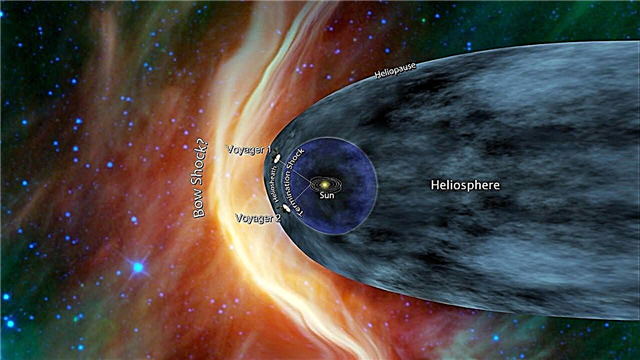
Kuidas JPL-i meeskond teadis Marsil toimuvat? - (Maa ja Marsi vahelise kauguse tõttu tekkis raadios viivitus 13,8 minutit).
MSL saatis iga juhtunud sündmuse jaoks välja erinevad toonid ja protsessi etappide aktiveerimisel näitasid 128 erinevat heli; üks heli näitas langevarju kasutamist, teine aga signaali, et sõiduk oli mootoriga lennul, ja veel üks, et Sky Crane oli aktiveeritud. Need helid olid rea põhiliste eriliste raadiohelide seeria.
Need olid lihtsad heli, edastatud X-sagedusalas, võrreldavad semaforkoodidega, mitte täieliku telemeetriaga. Sügava kosmose võrk kuulas neid otse Maale edastamist. Maa väljus aga kosmoseaparaadi vaateväljast, seades "marsruudi" alla Marsi horisondi, laskumisel osaliselt läbi, nii et X-riba helinaid polnud laskumisel ja maandumisel viimaste sammude kinnitamiseks kasutada. Selleks ajaks oli telemeetria painutatud toruga relee Odüsseia kosmoselaeva kaudu alanud.
Kuulata oli ka kosmoselaeva Mars Express. See salvestas umbes 20 minutit roveri ülekandeid ja helisid. ESA insenerid on nüüd kokku pannud helitaasesituse, tihendades 20-minutise heli umbes 19 sekundiks, mida inimesed kuulevad. See on NASA missiooni Marsile saabumise ja selle seitsmeminutilise sukeldumise "tõetruu heli" taasesitus. Punase Planeedi pind, ”kirjutas Euroopa Kosmoseagentuuri meeskond. Heli saab kuulata siit.
Ja kui peate maandumishaagist veel korra vaatama, siis see on järgmine:
* Hinnanguliselt jälgis JPLi UStreami voogu võrgus vähemalt 3,2 miljonit inimest. Kosmoseajakirja Live Hangout on Air Virtual Landing Party, kokku 30 000 vaatajat, maksimaalselt 7000 samaaegset vaatajat. Selles CNET-i artiklis öeldakse, et tippajal jälgis 500 000 inimest NASA HDTV, JPL ja JPL 2 otseülekannete otseülekannet Ustreami kaudu. Kuigi selliseid numbreid teleris pole saadaval, tsiteerib Mashable uuringufirma Nielseni öiseid hinnanguid - CNN-i oli 426 000 vaatajat, MSNBC-d 365 000 ja Fox oli suurim 803 000 vaatajaga -, mille üldine arv on madalam kui Ustreamil.