Järgnev on katkend minu uuest raamatust “Uskumatud lood kosmosest: stseenide tagavaade pilgule missioonidele, mis muudavad meie vaadet kosmosele”, mis ilmub homme, detsembris. Raamat on seest pilk mitmele praegusele NASA robotmissioonid ja see väljavõte on osa 3-st 3, mis postitatakse siia kosmoseajakirja 2. peatüki “Marssi marssimine uudishimuga” alla. Raamat on tellimiseks saadaval Amazon'is ja Barnes & Noble'is.
Seitse minutit terrorit
Mõõduka suurusega kosmoselaeva - näiteks roveri või robot-maanduri - laskumiseks läbi Marsi atmosfääri ja planeedi pinnale on vaja umbes seitse minutit. Nende lühikeste minutite jooksul peab kosmoselaev aeglustuma oma lõõmava sissetuleva kiirusega umbes 13 000 miili tunnis (20 900 km / h), et allapoole pöörduda vaid 2 miili tunnis (3 kmph) või vähem.
Selleks on vaja Rube Goldbergi sarnast üritustesarja toimuda täiuslikus järjestuses, täpse koreograafia ja ajakavaga. Ja see kõik peab toimuma automaatselt arvuti kaudu, ilma, et keegi seda Maa peal annaks. Kosmosesõidukit ei saa meie planeedist kaugemal, umbes 150 miljoni miili (250 miljonit km) kaugusel, suunata. Sellel kaugusel võtab raadiosignaali viivituse aeg Maast Marsi üle 13 minuti. Seetõttu, kui seitsmeminutiline laskumine on lõppenud, on kõik need sündmused juhtunud - või pole juhtunud - ja keegi Maa peal ei tea, mis neist. Kas teie kosmoselaev istub suurepäraselt Marsi pinnal või asub kukkunud hunnikus.

Seetõttu nimetavad Marsi-missioonide teadlased ja insenerid seda “seitsmeks minutiks terrorist”.
Ja koos Marsi Teaduslabori (MSL) missiooniga, mis käivitati Maalt 2011. aasta novembris, suurenes plahvatuslikult kartus ja hirm selle ees, mida nimetatakse ametlikult sisenemiseks, laskumiseks ja maandumiseks (EDL). MSL-il on 1-tonnine (900 kg), 6-rattaline rover, mille nimi oli Curiosity, ja see rover kavatses kasutada uhiuut, proovimata maandumissüsteemi.
Praeguseks on kõik Marsi maandurid ja roverid kasutanud - järjekorras - raketi abil juhitavat sisenemist, kuumakilpi sõiduki kaitsmiseks ja aeglustamiseks, seejärel langevarju, millele järgnevad tõukejõud, et sõidukit veelgi veelgi aeglustada. Uudishimu kasutaks ka seda järjestust. Viimane, ülioluline komponent hõlmas aga ühte keerukaimat maandumisseadet, mis eales lennanud.

„Sky Crane” -ks nimetatud hõljuv raketilava langetaks Roverit Vectrani trossi 66 jalga (20 meetrit) kaablil nagu koputavat mägironijat, kui rover maandus otse ratastel. See kõik tuli lõpule viia mõne sekundiga ja kui pardaarvuti tundis puudutust, katkestas pürotehnika köied ja hõljuv laskumistetapp suumib täie hooga kaugemale, et uudishimust kaugele jõuda.
Olukorda veelgi keerukamaks tehes üritas see rover läbi aegade kõige täpsemat maandumist, astudes kraatri sisse mäe kõrvale kõrgusse Rainieri mäe kõrgusele.
Suurem osa ebakindlusest oli see, et insenerid ei saanud kunagi katsetada kogu maandumissüsteemi korraga koos. Ja miski ei saaks simuleerida Marsil esinevaid jõhkraid atmosfääritingimusi ja kergemat gravitatsiooni, välja arvatud see, et nad asuvad Marsil endal. Kuna tegelikku maandumist kasutatakse esimest korda täismassiga Sky Crane'i kasutamisel, tekkisid küsimused: Mis juhtuks, kui kaablid ei eralduks? Mis siis, kui laskumistaadium laskub otse roveri peal?
Kui taevakraan ei töötaks, oleks see juba nii palju üle saanud missiooni jaoks tehniline probleem: tehnilised probleemid, viivitused, kulude ületused ja kriitikute viha, kes ütlesid, et see 2,5 miljardi dollarine Marsi rover veritses raha eemale ülejäänud NASA planeetide uurimise programm.

Missioonid Marsile
Öösel taevas oleva punase säraga on Mars sajandeid taevavaatlejaid kutsunud. Maale kõige lähemal asuva planeedina, mis pakub igasuguseid potentsiaalseid inimmissioone või kolonisatsioone, on see kosmoseuuringute ajastul suurt huvi pakkunud. Praeguseks on Punasele Planeedile käivitatud üle 40 robotmissiooni või, täpsemalt, 40-pluss-missioonid üritas.
Arvestades kõiki USA, Euroopa, Nõukogude / Vene ja Jaapani jõupingutusi, on enam kui pooled Marsi missioonid läbi kukkunud kas stardikatastroofi, rikke tõttu Marsil, orbiidile libisetud katse või katastroofilise maandumise tõttu. Kui viimastel missioonidel on olnud suurem edu kui meie esimestel pioneerikatsetel uurida Marsi in situ (kohapeal), teevad teadlased ja insenerid ainult osaliselt nalja, kui nad räägivad sellistest asjadest nagu „Suur galaktiline pahe” või „Marsi needus”, mis segab lähetused.

Kuid ka seal on olnud suurepäraseid õnnestumisi. Varased missioonid 1960ndatel ja 70ndatel, nagu Marineri orbiidid ja viikingite maandurid, näitasid meile silmatorkavalt kaunist, ehkki viljatu ja kivist maailma, tuues sellega lootuse „väikeste roheliste meeste” tekkeks meie planeedinaabriteks. Kuid hilisemad missioonid paljastasid dihhotoomia: suurepärane lohutus koos vapustavate vihjetega mineviku - või võib-olla isegi tänapäeva - veest ja globaalsest tegevusest.
Täna on Marsi pind külm ja kuiv ning tema õhuke atmosfäär ei kaitse planeeti Päikese kiirguse pommitamise eest. Kuid näited on olukorrad Marsil, mis polnud alati nii. Orbiidilt on nähtavad kanalid ja keerulised orusüsteemid, mis paistavad olevat voolav vesi.
Planeediteadlased on aastakümneid arutanud, kas need tunnused moodustusid lühikestel niisketel perioodidel, mis olid põhjustatud kataklüsmilistest sündmustest, nagu massiline asteroidi löök või järsk kliimakatastroof, või tekkisid need miljonite aastate jooksul, kui Marss võis olla pidevalt soe ja märg. Suur osa senistest tõenditest on mitmetähenduslikud; need omadused oleksid võinud moodustuda kummalgi viisil. Kuid miljardeid aastaid tagasi, kui oleks jõgesid ja ookeane, nagu ka Maal, oleks elu võinud haarata.

Roversid
Rover Curiosity on neljas mobiilne kosmoselaev, mille NASA on Marsi pinnale saatnud. Esimene neist oli 23-naeline (10,6 kg) mootorratas nimega Sojourner, mis maandus kiviga kaetud Maarjamaa tasandikul 4. juulil 1997. Umbes mikrolaineahju suuruses ei läbinud kahe jala pikkune (65 cm) pikkune Sojourner kunagi. rohkem kui 40 jala kaugusel maandumist ja tugijaama. Rover ja maandur moodustasid Pathfinderi missiooni, mis pidi kestma umbes nädal. Selle asemel kestis see ligi kolm kuud ja duo naasis 2,6 gigabiti andmeid, jäädvustades rohkem kui 16 500 pilti maandurilt ja 550 pilti roverilt, samuti kivide ja pinnase keemilisi mõõtmisi ning uurides Marsi atmosfääri ja ilma. See tuvastas Marsi jaoks jäljed soojemast, märjemast minevikust.

Missioon leidis aset siis, kui Internet oli lihtsalt populaarsust kogumas, ja NASA otsustas postitada roveri pildid veebis kohe, kui need Maale tabasid. See oli üks noorema Interneti ajaloo suurimaid sündmusi, sest NASA veebisait (ja suure nõudluse jaoks loodud peeglisaidid) sai esimese 20 päeva jooksul pärast maandumist üle 430 miljoni tabamuse.
Ka Pathfinder kasutas ebaharilikku maandumissüsteemi. Selle asemel, et maapinnal puudutada tõukejõudu, koostasid insenerid kosmoseaparaadi ümbritsemiseks ja kaitseks hiiglaslike turvapatjade süsteemi. Pärast tavapärase raketi abil juhitava sisenemise süsteemi, kuumakilbi, langevarjude ja tõukejõu kasutamist olid õhupadjad täis pumbatud ja kookoniga lander langes maapinnast 100 jalga (30 m). Põrgates mitu korda üle Marsi pinna nagu hiiglaslik rannapall, jõudis Pathfinder lõpuks peatuseni, turvapadjad tühjenesid ja maandur avanes, et rover saaks välja tulla.
Ehkki see võib tunduda hullumeelse maandumisstrateegiana, toimis see nii hästi, et NASA otsustas järgmisel rover-missioonil kasutada suuremaid turvapatju: kahte identset roverit nimega Spirit ja Opportunity. Mars Exploration Rovers (MER) on umbes 5,2 jalga (1,6 meetrit) pikkune sõitva muruniiduki suurune ja kaalub umbes 185 naela (400 naela). Vaim maandus edukalt Marsi ekvaatori lähedal 4. jaanuaril 2004 ja kolm nädalat hiljem põrkas Opportunity teisele poole planeeti. MER eesmärk oli leida tõendeid minevikus olnud vee kohta Marsil ja mõlemad roverid tabasid jackpotti. Paljude leidude hulgast leidis Opportunity iidsed kivikalmed, mis olid moodustunud voolavas vees, ja Spirit leidis ebatavalised lillkapsakujulised ränidioksiidi kivimid, mida teadlased alles uurivad, kuid need võivad anda vihjeid potentsiaalsele iidsele Marsi elule.

Uskumatult, et selle kirjutamise ajal (2016) Oversity rover töötab endiselt, sõites rohkem kui maratoni (26 miili / 42 km) ja ta jätkab Marsi uurimist suure kraatri nimega Endeavour. Vaim aga pääses jõu kaotusest 2010. aasta külmal Marsi talvel pärast liivapüünisse takerdumist. Kaks roverit edestasid kavandatud 90-päevast eluiga kaugelt.
Millegipärast arenesid igal roveril omaette isiksus - või, ehk parem viis selle väljendamiseks, on inimesed määratud isiksused robotitele. Vaim oli probleemne laps ja draamakuninganna, kuid pidi iga avastuse nimel pingutama; Võimalus, privilegeeritud noorem õde ja staarnäitleja, kuna uued leiud tundusid talle olevat lihtsad. Vaim ja võimalus ei olnud mõeldud jumalikuks, kuid võluvad roverid hõivasid nii laste kui ka kogenud kosmoseveteranide kujutlusvõimet. MER-i projektijuht John Callas nimetas kaksikvankrid kord "päikesesüsteemi kõige armsamateks rõvedateks asjadeks". Kuna pikaealised rohked rändurid said ohtudest ja ohtudest üle, saatsid nad iga päev Marsilt postkaarte. Ja Earthlings armastasid neid selle pärast.
Uudishimu
Kuigi see on juba pikka aega olnud meie kosmoseülesannete loendis, pole me veel päris täpselt välja mõelnud, kuidas inimesi Marsile saata. Vajame suuremaid ja arenenumaid rakette ja kosmoselaevu, paremat tehnoloogiat selliste asjade jaoks nagu elu toetamine ja oma toidu kasvatamine ning meil pole tegelikult võimalust maanduda Marsile inimasustuse loomiseks vajalikke väga suuri koormusi.
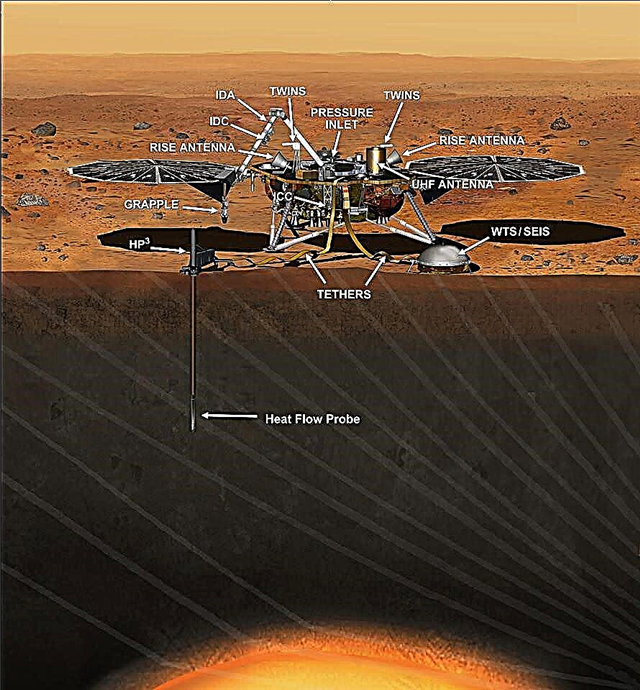
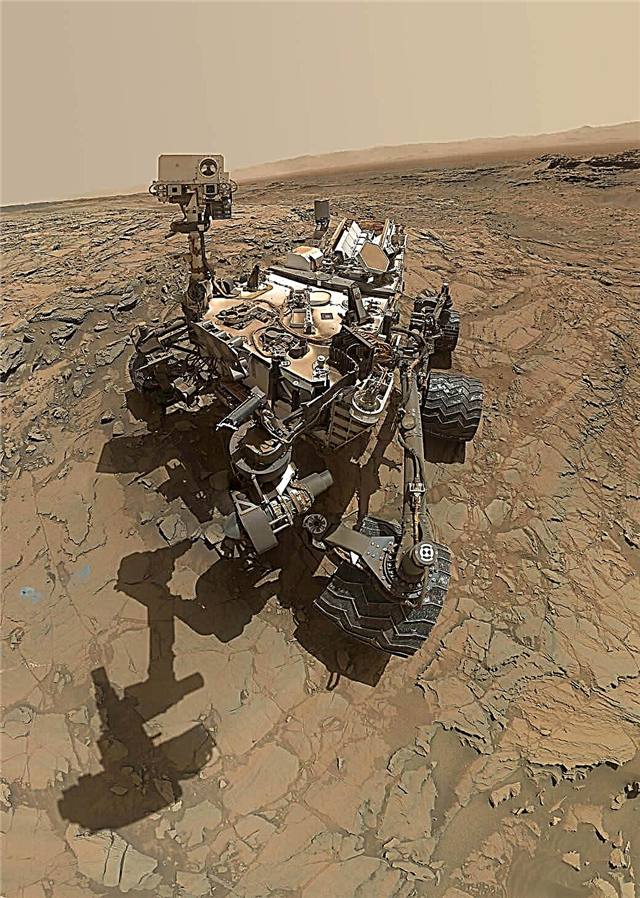
Kuid vahepeal - kuigi me proovime seda kõike välja mõelda -, oleme saatnud Punasele planeedile inimese geoloogi roboti ekvivalendi. Autosuurune Curiosity rover on relvastatud seitsmeteistkümne kaameraga, puuri, kühvel, käsiläätse ja isegi laseriga. Need tööriistad meenutavad seadmeid, mida geoloogid kasutavad kivide ja mineraalide uurimiseks Maal. Lisaks jäljendab see rover inimtegevust mägironimise, söömise (piltlikult öeldes), oma (robot) käe painutamise ja selfide võtmisega.

See rovingi robotgeoloog on ka mobiilne keemialabor. Roveril kokku kümme instrumenti aitavad otsida orgaanilist süsinikku, mis võiks osutada eluks vajalikule toorainele, ja “nuusutada” Marsi õhku, püüdes haiseda, kui leidub metaani sarnaseid gaase - mis võivad olla märgiks elust. Curiosity robotkäes on Šveitsi armee nuga vidinaid: suurendusklaasiga sarnanev kaamera, spektromeeter keemiliste elementide mõõtmiseks ning puur kivide sees puurimiseks ja proovide söötmiseks laboritesse nimega SAM (proovide analüüs Marsil) ja) ning CheMin. (Keemia ja mineraloogia). ChemCami laser suudab kivimit aurutada kuni 7 jalga (7 meetrit) eemale ja tuvastada mineraalid plahvatanud kivist eralduva valguse spektrist. Ilmajaam ja radiatsioonimonitor ümardavad pardal olevad seadmed ümber.
Nende kaamerate ja instrumentidega saab rover silma ja käeks umbes 500 maapealse teadlasega rahvusvahelisele meeskonnale.
Kui varasemad Marsi roverid kasutasid päikesekiirguse saamiseks päikesevalgust, kasutab Curiosity RTG-d nagu New Horizons. RTG-st toodetud elekter toidab korduvalt laetavaid liitium-ioonakusid ning RTG-soojus juhitakse ka roveri šassiisse, et hoida salongi elektroonikat soojana.
Curiosity suuruse ja kaalu korral ei olnud eelnevate roverite poolt kasutatud turvapadja maandumissüsteem väljas. Nagu NASA insener Rob Manning selgitas, ei saa te midagi nii suurt põrgatada. Sky Crane on mõistlik lahendus.
Uudishimu missioon: uurige, kuidas Mars miljardite aastate jooksul arenes, ja otsustage, kas see kunagi oli - või isegi praegu - võimeline mikroobide elu toetama.
Uudishimu sihtmärk uurimiseks: 3,4-miili (5,5 km) kõrgust Marsi mägede teadlased kutsuvad Mt. Terav (ametlikult tuntud kui Aeolis Mons), mis asub Gale kraatri keskel, 96-miilise (155 km) läbimõõduga kokkupõrkebasseinis.
Gale valiti 60 kandidaadikoha hulgast. Kosmoseaparaadist tiirlevate andmete põhjal oli mäel kümneid settekivimikihte, mis on võib-olla ehitatud miljonite aastate jooksul. Need kihid võiksid rääkida Marsi geoloogilisest ja kliimaajaloost. Lisaks näib, et nii mäel kui ka kraatril on kanalid ja muud omadused, mis näevad välja sellised, nagu oleks neid voolav vesi nikerdanud.
Plaan: MSL maandub kraatri madalamasse ja lamedamasse ossa ning töötab ettevaatlikult ülespoole mäe poole, uurides iga kihti, tutvustades sisuliselt Marsi geoloogilise ajaloo ajastut.
Kõige raskem oleks sinna jõudmine. Ja MSL-i meeskonnal oli ainult üks võimalus see korralikult korda saada.
Maandumisöö
Curiosity maandumine 5. augustil 2012 oli lähiajaloo üks oodatumaid kosmoseuuringute sündmusi. Miljonid inimesed jälgisid sündmusi nii Internetis kui ka teleris. Sotsiaalmeedia kanalid sumisevad värskendustega. NASA TV kanali JPL missioonikontrollist edastati otseülekannet New Yorgi Time Square'i ekraanidel ja kohtades kogu maailmas, kus korraldatakse maandumispeoid.
Kuid tegevuse epitsenter oli JPL-is, kus sajad insenerid, teadlased ja NASA ametnikud kogunesid JPL-i kosmoselendude rajatiste juurde. EDL-i meeskond - kõik kannavad sobivaid helesiniseid polosärke - jälgisid missiooni juhtimisel arvutikonsoone.
Kaks meeskonnaliiget paistsid silma: EDL-i meeskonna juht Adam Steltzner - kes kannab oma juukseid Elvise-sarnases pompadouris - sammus edasi-tagasi konsoolide ridade vahel. Lennurežissöör Bobak Ferdowski oli sportlik ja osavate tähtede ja triipudega Mohawk. Ilmselt on 21. sajandi jooksul eksootilised juuksurid asendanud NASA inseneride 1960. aastate mustad prillid ja taskukaitsed.

Maandumise ajal oli Ashwin Vasavada üks missioonimeeskonna kõige kauem teeninud teadlasi, kes liitus MSL-iga projekti teadlase asetäitjana 2004. aastal, kui roverit ehitati. Toona töötas suur osa Vasavada tööst pillimeeskondadega, et viia lõpule nende pillide eesmärgid, ning juhendada tehnilisi meeskondi, kes aitaksid pillidel välja töötada ja neid roveriga integreerida.
Kõik kümme valitud seadet tõid kaasa teadlaste meeskonna, nii et koos inseneride, lisatöötajate ja üliõpilastega valmistas sadu inimesi roveri käivitamiseks valmis. Vasavada aitas koordineerida kõiki otsuseid ja muudatusi, mis võivad mõjutada Marsil tehtud teadust. Maandumise ajal oli aga kõik, mida ta teha sai, valve.
"Olin ruumis selle juhtimisruumi kõrval, mida televiisorist näidati," rääkis Vasavada. "Maandumiseks ei saanud ma midagi muud teha, kui oma elu kaheksa viimast aastat teadvustada ja kogu mu tulevik sõitis kõik sellel seitsmel minutil EDL-i."
Ja see, et keegi ei teadnud roveri tegelikku saatust kuni 13 minutit pärast seda raadio viivituse tõttu, põhjustas JPL-is kõigile abitust.
"Kuigi ma istusin toolil," lisas Vasavada, "arvan, et olin vaimselt looteasendis üles kaardunud."
Kui Curiosity kiirustas Marsile lähemale, liikusid kolm teist juba planeedil tiirlevat kosmoselaeva oma kohale, et uustulnukal MSL-il silma peal hoida, kuna see edastas teavet selle oleku kohta. Alguses suhtles MSL otse Maa sügava kosmosevõrgu (DSN) antennidega.
Et telemeetriat kosmoseaparaadist EDL-i ajal võimalikult sujuvaks muuta, saatis Curiosity välja 128 lihtsat, kuid selget heli, mis näitasid, kui maandumisprotsessi etapid aktiveerusid. Juhtimisruumi insener Allen Chen kuulutas kõik kohale tulles: üks heli näitas, et kosmoselaev sisenes Marsi atmosfääri; teine andis märku tulistatud tõukejõude, suunates kosmoselaeva Gale kraatri poole. Esialgsed plaksutamised ja naeratused tulid Mission Controli meeskonnalt varajastes toonides, emotsioonid kasvasid, kui kosmoselaev liikus pinnale lähemale ja lähemale.
Osalt laskumise ajal läks MSL Marsi horisondist allapoole, lastes selle sidest Maaga välja. Kuid kolm orbiiti - Mars Odyssey, Mars Reconnaissance Orbiter ja Mars Express - olid valmis andmeid DSN-ile jäädvustama, registreerima ja edastama.

Sujuvalt hakkasid Maale jõudma toonid, kuna maandumise iga samm jätkus veatult. Langevari kasutusele võetud. Kuumuskilp langes ära. Helisignaal andis märku laskumisastmest, mis viis roverit langevarjuga lahti laskmisele, teine näitas mootoriga lendu ja laskus pinna poole. Veel üks toon tähendas, et Sky Crane hakkas roverit pinnale laskma.
Saabus helisignaal, mis näitas, et Curiosity rattad puudutasid pinda, kuid isegi see ei tähendanud edu. Meeskond pidi veenduma, et Sky Crane lendu manööver toimis.
Siis tuli toon, mida nad ootasid: “Puudutus kinnitati,” rõõmustas Chen. "Me oleme Marsil turvalised!"
Pandemonium ja rõõm purskasid JPL-i missioonide juhtimises, maandumispeo saitidel ja sotsiaalmeedias. Tundus, et maailm tähistas sel hetkel koos. Kulude ületused, viivitused, kõik negatiivsed asjad, mis MSL-i missiooni kohta kunagi öeldud, näisid kaduvat maandumise võidukäiguga.
"Tere tulemast Marsile!" reaktiivlennukite laboratooriumi direktor Charles Elachi ütles dramaatilisele maandumisele järgnenud pressikonverentsil: „Täna maandusime, homme alustame Marsi uurimist. Meie uudishimul pole piire. ”

"Need seitse minutit läksid tegelikult väga kiiresti," ütles Vasavada. “See oli möödas enne, kui me seda teadsime. Siis hüppasid kõik üles ja alla, ehkki enamik meist alles töötles, et see nii edukalt läks. ”
See, et maandumine läks nii hästi - tõepoolest suurepäraselt - võis mõnda JPL meeskonda tegelikult šokeerida. Kuigi nad olid Curiosity maandumist mitu korda harjutanud, ei suutnud nad märkimisväärselt, et nad ei suutnud sõidukit oma simulatsioonide käigus kunagi maanduda.
"Proovisime seda väga täpselt harjutada," sõnas Vasavada, "nii et kõik oli sünkroonis - nii meie simuleeritud telemeetria, mis kosmosesõidukilt tuleb, kui ka loodud reaalajas animatsioonid. See oli päris keeruline asi, kuid tegelikult see kunagi ei töötanud. Nii et tegelik, tegelik maandumine oli esimene kord, kui kõik toimis õigesti. ”
Uudishimu oli programmeeritud selle ümbrust kohe pildistama. Kahe minuti jooksul pärast maandumist tehti esimesed pildid Maale ja hüppes JPL-i vaateekraanidele.
"Olime ajasdanud orbiidid maandumise ajal üle lendama, kuid ei teadnud kindlalt, kas nende releeühendus kestab piisavalt kaua, et esialgsed pildid alla saada," rääkis Vasavada. Need esimesed pildid olid üsna kirevad, kuna kaitsekatted olid endiselt kaamerate peal ja tõukejõud olid kaante külge palju tolmu kogunud. Me ei osanud seda eriti hästi näha, kuid hüppasime siiski üles ja alla, sest need olid pildid Marsist. "
Hämmastav, et üks esimestest piltidest näitas täpselt seda, mida rover oli saadetud õppima.
„Olime maandunud kaameratega, mis olid põhimõtteliselt otse otse Mt. Terav, ”sõnas Vasavada pead raputades. „HazCami (ohutuskaamera) pildil, otse rataste vahel, oli meil see uhke võte. Seal oli mägi. See oli nagu kogu missiooni eelvaade otse meie ees. ”

Homme: 2. osa "Marsil ringi liikudes uudishimuga" koos "Maa peal elamise ajaga" ja "Avastustega"
“Uskumatud lood kosmosest: stseenide pilk missioonidele, mis muudavad meie vaadet kosmosele” on avaldatud Macmillani tütarettevõttes Page Street Publishing.