NASA reaktiivmootorite laboratoorium teatas hiljuti, et töötab välja väikest droonhelikopterit, et otsida teed tulevastele Marsi roveritele. Miks vajaksid Marsi roverid sellist robotijuhist? Vastus on, et Marsil sõitmine on tõesti raske.
Siin Maal saavad vulkaanilisi velgi uurivad või päästjaid abistavad robotid juhtida juhtpuldi abil kaugjuhtimisega. Selle põhjuseks on see, et raadiosignaalid jõuavad robotini selle juhtimiskeskusest peaaegu kohe. Kuul sõitmine pole palju raskem. Valguskiirusel liikuvatel raadiosignaalidel kulub edasi-tagasi kuule ja tagasi liikumiseks umbes kaks ja pool sekundit. See viivitus pole piisavalt pikk, et tõsiselt häirida kaugjuhtimispuldiga sõitmist. 1970. aastatel sõitsid Nõukogude kontrolörid Lunokhodi kuuseismeid sel viisil, uurides edukalt enam kui 40 km pikkust Kuu maastikku.
Marsil sõitmine on palju raskem, sest see asub nii palju kaugemal. Sõltuvalt selle asukohast Maa suhtes võivad signaalid edasi-tagasi sõita 8 kuni 42 minutit. Eelprogrammeeritud juhised tuleb saata roverile, mida see siis iseseisvalt täidab. Iga Marsi autosõit võtab tundidepikkuse hoolika planeerimise. Insenerid kontrollivad hoolikalt roveri navigatsioonikaameratega tehtud stereopilte. Marsil tiirlevate kosmoselaevade pildid pakuvad mõnikord täiendavat teavet.
Roveri saab programmeerida nii, et see lihtsalt täidab Maalt saadetud sõidukäskude loendit, või saab ta kasutada kiirusmõõtmiseks ja takistuste või ohtude tuvastamiseks oma navigatsioonikaamerate tehtud ja pardaarvutites töödeldud pilte. See võib isegi joonistada oma kindla tee kindla eesmärgini. Kiireimad on maapinnalt saadud juhiste järgi sõidavad ajamid.
Marssi avastusretkede vaim ja võimalus võiksid sel viisil tunnis sõita kuni 124 meetrit. See vastab umbes Ameerika jalgpalliväljaku pikkusele. Kuid see režiim oli ka kõige vähem ohutu.
Kui rover ise oma kaameratega aktiivselt juhendab, on edasiminek turvalisem, kuid kogu vajaliku pilditöötluse tõttu palju aeglasem. See võib edeneda vaid 10 meetrit tunnis, mis on umbes kaugus väravajoonest 10 jardi jooneni Ameerika jalgpalliväljakul. Seda meetodit tuleb kasutada alati, kui roveril ei ole eesolevast marsruudist selget vaadet, mis sageli juhtub kareda ja künkliku maastiku tõttu.
2015. aasta alguse seisuga on kaugeim Curiosity ühe päevaga sõitnud 144 meetrit. Opportunity pikim ööpäevane sõit oli 224 meetrit, mis oli kahe Ameerika jalgpalliväljaku pikkus.
Kui maapealsed lennujuhid saaksid eesseisvast teest parema ülevaate, võiksid nad välja töötada juhised, mis võimaldaksid tulevasel roveril päevas turvaliselt palju kaugemale sõita.
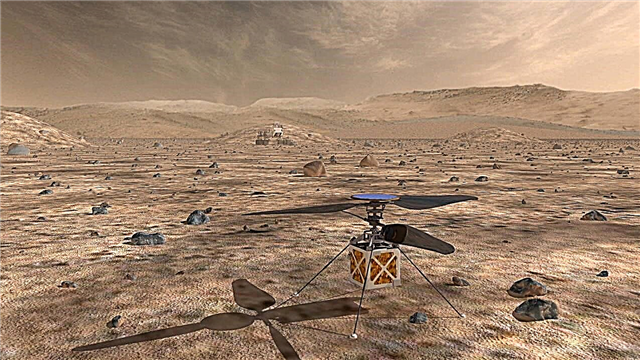
Sealt tuleb idee droonhelikopterist. Kopter võiks iga päev roveri ees välja lennata. Selle õhupunktist tehtud pildid oleksid maapealsetele lennujuhtidele hindamatu väärtusega, et selgitada välja teaduslikult huvipakkuvad punktid ja sinna jõudmiseks sõiduteed kavandada.
Kopteriga lendamine Marsile on eriline väljakutse. Üks eelis on see, et Marsi gravitatsioon on vaid 38% nii tugev kui Maa omal, nii et kopteril poleks vaja tekitada nii palju tõstuki kui üks sama mass Maa peal. Kopteri propelleri labad tekitavad tõusu, surudes õhku allapoole. Seda on Marsil raskem teha kui Maal, sest Marsi atmosfäär on sada korda õhem. Piisava õhu väljatõrjumiseks peaksid propelleri labad pöörlema väga kiiresti või olema väga suured.
Kopter peab olema võimeline lendama iseseisvalt, kasutades eelnevaid juhiseid, säilitades stabiilse lennu eelnevalt kindlaksmääratud marsruudil. See peab maanduma ja startima korduvalt kivisel Marsi maastikul. Lõpuks peab see suutma üle elada ka Marsi karmid tingimused, kus temperatuur langeb igal õhtul 100 kraadi Fahrenheiti järgi või madalamale.
JPL-i insenerid kavandasid kopteri massiga 1 kilogramm; väike osa Curiosity roveri 900 kg massist. Selle propelleri labad ulatuvad tera tipust tera tipuni 1,1 meetrini ja on võimelised pöörlema 3400 pöörde juures minutis. Keha on umbes koekarbi suurune.
Kopter on päikeseenergial töötav. Päikesepatareide ketas kogub iga päev piisavalt energiat kahe-kolmeminutilise lennu juhtimiseks ja sõiduki soojendamiseks öösel. Selle ajaga saab lennata umbes pool kilomeetrit, kogudes pilte maapealseks juhtimiseks, kui see läheb. Insenerid eeldavad, et droonikopteri kogutud tutvumine on roveri ajamite kavandamisel hindamatu väärtusega, kolmekordistades päevas läbitava vahemaa.
Viited ja täiendav lugemine:
Tänu Mark Maimone'ile NASA reaktiivmootorite laboratooriumist teabe eest uudishimu ja võimaluste igapäevaste sõidukauguste kohta.
J.J. Biesiadecki, P. C. Leger ja M. W. Maimone (2007), „Marsi uurimisteekonna suunatava ja autonoomse sõidu vaheline kompromiss”, The International Journal of Robotics Research, 26 (1), 91–104
E. Howell, Opportunity Marssi rover kulgeb 41 kilomeetri kaugusel Maratoni oru suunas, kosmoseajakiri, detsember 2014.
T. Reyes, Uskumatu teekond, Mars Curiosity rover jõuab Mount Sharpi baasi. Ajakiri Kosmos, september 2014.
Helikopter võiks olla Marsi roverite jaoks skaut. NASA reaktiivmootorite laboratooriumi pressiteade. 22. jaanuar 2015.
Hull tehnika: Marsi kopter. NASA reaktiivmootorite laboratooriumi video.
Uudishimu - NASA Marsi teaduslabor.
Marss - tuleviku roveri plaanid. NASA