Järgnev on viimane väljavõte minu uuest raamatust “Uskumatud lood kosmosest: stseenide tagant pilk missioonidele, mis muudavad meie vaadet kosmosele”. Raamat on mitme NASA praeguse robotimissiooni sissejuhatus ja see väljavõte on osa 3-st 3, mis on siia kosmoseajakirja postitatud, 2. peatükist „Marssi kergitamine uudishimuga“. 1. ja 2. osa saate lugeda siit. Raamat on saadaval trükisena või e-raamatuna (Kindle või Nook) Amazon ja Barnes & Noble.
Kuidas sõita Mars Roveriga
Kuidas Curiosity teab kuhu ja kuidas üle Marsi pinna sõita? Võite kujutada JPL-i insenere juhtkangide abil, sarnaselt kaugjuhtimispuldi mänguasjade või videomängude jaoks kasutatavate juhtkangidega. Kuid erinevalt RC juhtimisest või mängimisest ei ole Marsi roveri draiveritel viivitamatut visuaalset sisendit ega videoekraani, et näha, kuhu rover läheb. Ja nagu maandumisel, on ka alati viivitus, millal käsk roverile saadetakse ja millal see Marsile vastu võetakse.
"See ei sõida reaalajas interaktiivses mõttes, kuna aeg on liiga pikk," selgitas roverisõitjate meeskonda juhendav John Michael Morookian.
Morookiani ja tema meeskonna tegelik ametinimetus on Rover Planners, mis kirjeldab täpselt, mida nad teevad. Roverite iseenesest „sõitmise” asemel; nad kavandavad marsruudi ette, programmeerivad spetsiaalse tarkvara ja laadivad juhised üles Curiosity.
"Kasutame pilte, mis on tehtud selle ümbruse roverilt," ütles Morookian. „Meil on neljast mustvalgest navigatsioonikaamerast koosnevate stereopiltide komplekt koos Hazcams (ohu vältimise kaamerate) piltidega, mida toetavad MastCami kõrge eraldusvõimega värvipildid, mis annavad meile üksikasju maastiku olemuse kohta ees ja vihjeid kivimite ja mineraalide liikide kohta saidil. See aitab tuvastada teadlastele huvitavaid struktuure. ”
Kasutades kõiki saadaolevaid andmeid, saavad nad spetsiaalse tarkvaraga Rover Sequencing and Visualization Program (RSVP) luua maastiku kolmemõõtmelise visuaali.
"See on põhimõtteliselt Marsi simulaator ja panime stseeni panoraami simuleeritud Curiosity, et visualiseerida, kuidas rover saaks oma teelt läbi liikuda," selgitas Morookian. “Saame panna ka stereoklaasid, mis võimaldavad meie silmadel näha stseeni kolmes mõõtmes, justkui oleksime koos roveriga kohal.
Virtuaalses reaalsuses saavad rover-juhid sündmuskoha ja roveriga manipuleerida, et testida kõiki võimalusi, millised marsruudid on parimad ja milliseid alasid vältida. Seal saavad nad teha kõik vead (takerduda koplisse, kalduda roverile, põrkuda suurde kaljusse, sõita kuristikust) ja täiustada sõidujärjestust, samal ajal kui tõeline rover jääb Marsil ohutuks.
“Teadlased vaatavad piltidelt läbi ka huvitavad omadused ja konsulteerivad tee määratlemiseks Rover Planneriga. Seejärel koostame üksikasjalikud käsud, mis on vajalikud uudishimu saamiseks punktist A punkti B seda teed pidi, ”rääkis Morookian. "" Saame lisada ka käsud, mis on vajalikud roveri suuna andmiseks saidiga kontakti saamiseks selle robotkäe abil. "

Niisiis, igal õhtul antakse roverile käsk kaheksaks tunniks sulgeda, et oma akusid tuumageneraatori abil laadida. Kuid kõigepealt saadab Curiosity Maale andmeid, sealhulgas pilte maastikust ja kogu teaduslikku teavet. Maal võtavad Roveri planeerijad neid andmeid, teevad oma planeerimistööd, viivad tarkvara programmeerimise lõpule ja suunavad teabe tagasi Marsile. Siis ärkab uudishimu, laadib alla juhised ja paneb tööle. Ja tsükkel kordub.
Curiosityl on ka funktsioon AutoNav, mis võimaldab roveril läbida alasid, mida meeskond pole piltidel veel näinud. Nii võib see minna üle mäe ja teiselt poolt kaardistamata territooriumile, kui AutoNav tuvastab võimalikud ohud.
"Me ei kasuta seda liiga sageli, kuna see on arvutuslikult kallis, see tähendab, et roveri sellel režiimil töötamine võtab palju kauem aega," sõnas Morookian. "Meile tundub, et parem kaubandus on lihtsalt järgmine päev tulla, vaadata pilte ja sõita nii kaugele kui võimalik."

Kuna Morookian näitas mulle JPL-is roveride kavandamise meeskondade erinevaid ruume, selgitas ta, kuidas need peavad toimima mitme erineva aja jooksul.
"Meil ei ole ainult igapäevane marsruudi kavandamine," ütles ta, "vaid ka pikamaa strateegilist planeerimist, kasutades Mars Reconnaissance Orbiteril asuva HiRISE kaamera orbitaalkujutisi ja valides rajad, lähtudes orbiidilt nähtud omadustest. Meie meeskond töötab strateegiliselt, otsides parimate teede määratlemiseks mitu kuud välja. ”
Teine protsess nimega Supra-Tactical näeb ette alles järgmist nädalat. See hõlmab teaduse kavandajaid, kes juhivad ja täpsustavad seda tüüpi toiminguid, mida rover lühikese aja jooksul läbi viib. Samuti, kuna keegi meeskonnast ei ela enam Marsiajal, töötavad Rover Planners reedel mitu päeva plaane välja.
"Kuna me ei tööta nädalavahetustel, sisaldavad reedene plaanid mitut tegevust," ütles Morookian. "Kaks paralleelset meeskonda otsustavad, millistel päevadel rover sõidab ja mis päevadel ta teeb muid tegevusi, näiteks töötab robotkäe või muude instrumentidega."
Nädalavahetusel roverilt alla tulnud andmeid jälgitakse siiski ja probleemide ilmnemisel kutsutakse meeskond üksikasjalikuma hinnangu saamiseks. Morookian teatas, et nad pidid mitu nädalavahetust erakorralise meditsiini meeskonda kaasama, kuid seni pole tõsiseid probleeme olnud. "See hoiab meid siiski varvastel," sõnas ta.
Roveril on mitmeid reaktiivseid ohutuskontrolle, mis käsitlevad roveriteki üldise kalde suurust ja rataste vedrustussüsteemi liigendust, nii et kui rover läheb üle liiga suure objekti, peatub see automaatselt.
Uudishimu ei olnud üles ehitatud kiirusele. See oli ette nähtud päevas kuni 200 meetri kõrguseks (660 jalga), kuid Solis sõidab see nii harva. 2016. aasta alguseks oli rover sõitnud üle Marsi pinna umbes 12 km (7,5 miili).

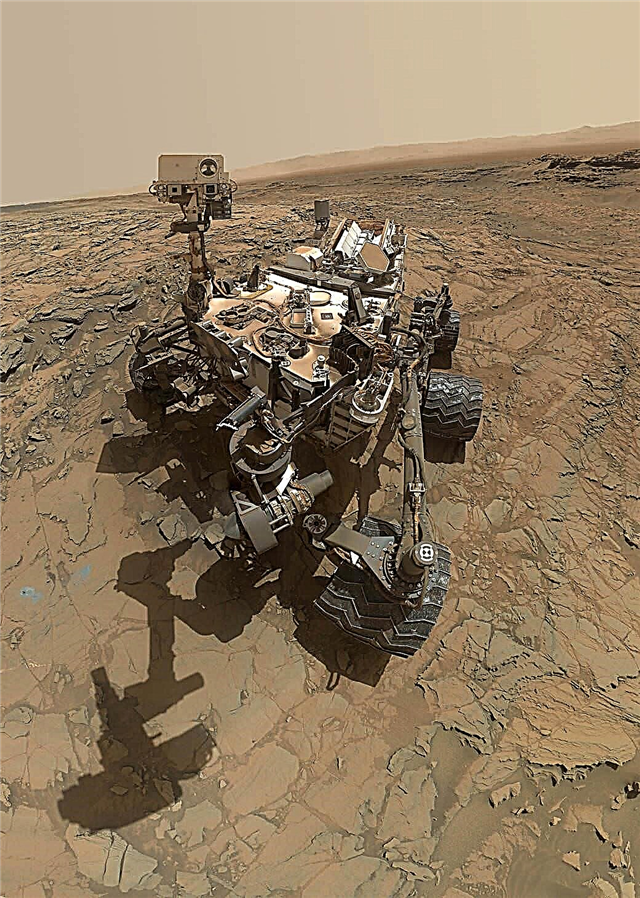
Curiosity on kaugele jõudnud mitmel viisil, kuid kõige täpsemat mõõtmist nimetatakse visuaalseks odomeetriaks. Curiosityl on ratastes spetsiaalsed augud Morse-kooditähtede kujul, mis kirjutavad välja JPL - noogutus koju roveri teadus- ja insenerimeeskondadest - üle Marsi pinnase.
"Visuaalne odomeetria toimib, kui võrrelda kõige uuemat stereopiltide paari, mis on kogutud umbes iga meetri peale draivi," ütles Morookian. „Stseeni üksikud omadused on omavahel sobitatud ja jälgitavad, et saada mõõde selle kohta, kuidas kaamera (ja seega ka rover) on kahe pildi vahel kolmemõõtmelises ruumis tõlkinud ja pööranud ning see annab meile üheselt aru, kui kaugele on uudishimu läinud . ”
Roverjälgede hoolikas kontroll võib tuvastada rataste veojõu ja selle, kas need on libisenud, näiteks kõrgete kallakute või liivase pinnase tõttu.
Kahjuks on Curiosity ratastel nüüd uued augud, mida seal ei peaks olema.
Roveri probleemid
Morookian ja projektiteadlane Ashwin Vasavada avaldasid mõlemad leevendust ja rahulolu, et üldiselt - see kaugel missioonil - on uudishimu üsna tervislik rover. Kogu teaduse kasulik koormus töötab praegu peaaegu täielikult. Kuid insenerimeeskond hoiab silma peal mõnel teemal.
"Sol 400 ümbruses saime aru, et rattad kuluvad kiiremini, kui me oskasime oodata," sõnas Vasavada.

Ja kulumine ei koosnenud ainult väikestest aukudest; meeskond hakkas nägema torkeid ja vastikuid pisaraid. Insenerid mõistsid, et augud tekitasid kõvad, sakilised kivid, millest rover sel ajal üle sõitis.
"Me ei oodanud täielikult selliseid" teravaid "kaljusid, mis kahjustavad," ütles Vasavada. “Tegime ka mõned katsed ja nägime, kuidas üks ratas suutis teise ratta kivisse suruda, muutes kahjustused veelgi hullemaks. Sõidame nüüd hoolikamalt ega sõida nii kaua kui varem. Oleme suutnud kahju tasandada vastuvõetavamale tasemele. ”
Missiooni alguses lülitas Curiosity arvuti mitu korda turvarežiimi, kuna Curiosity tarkvara leidis probleemi ja vastus oli edasise tegevuse keelamine ja koju helistamine.
Spetsiaalne rikkekaitse tarkvara töötab läbi kõigi moodulite ja instrumentide ning probleemi ilmnemisel peatub marsruuter ja saadab Maale andmeid, mida nimetatakse sündmuste kirjeteks. Salvestised hõlmavad erinevaid kiireloomulisuse kategooriaid ja 2015. aasta alguses saatis rover sõnumi, mis sisuliselt ütles: "See on väga-väga halb." Roveri käsivarrel olev külvik oli kogenud elektrivoolu kõikumist - nagu lühis.
"Curiosity tarkvara on võimeline tuvastama lühiseid, nagu teie vannitoas olev maapinna rikkevoolu katkestaja," selgitas Morookian, "välja arvatud see, mis ütleb teile, et see on väga, väga halb, selle asemel, et teile lihtsalt kollast tuld anda."
Kuna meeskond ei saa minna Marsile ja probleemi lahendada, on kõik parandatud kas tarkvarauuenduste saatmisega roverile või tööprotseduuride muutmisega.

"Oleme lihtsalt külviku kasutamise osas ettevaatlikumad," sõnas Vasavada, "ja ärge puurige alguses täie jõuga, vaid rambige aeglaselt. See on omamoodi nagu see, kuidas me nüüd sõidame, veelgi enam, aga ikkagi saab see töö tehtud. Sellel pole seni suurt mõju olnud. ”
Kergem puute puudutus oli vajalik ka roveri pehmemate mudakivide ja liivakivide jaoks. Morookian ütles, et on mure, et kihilised kivimid ei pruugi tavalise puurimisprotokolli kallaletungides vastu pidada, ja seetõttu kohandasid nad tehnikat madalaimate seadistuste jaoks, mis võimaldavad puuril siiski piisavalt kivisse liikuda.
Kuid võimalused drilli kasutamiseks suurenevad, kui Curiosity alustab mäest ülesjõudmist. Rover sõidab läbi selle, mida Vasavada nimetab „sihtrikkaks, väga huvitavaks piirkonnaks”, kuna teadusrühm töötab selle nimel, et siduda kokku geoloogiline kontekst kõigega, mida nad piltidel näevad.
Marsil tasakaalu leidmine
Ehkki Yellowknife'i lahes toimunud ümbersuunamine võimaldas meeskonnal teha suuremaid avastusi, tundsid nad survet Mt. Terav, nii et “sõitis nagu põrgu aasta läbi,” ütles Vasavada.
Nüüd on mäel endiselt surve missioonist maksimumi võtta, eesmärgiga see läbi viia vähemalt nelja erineva kaljuüksuse või kihi kaudu Mt. Terav. Iga kiht võiks olla nagu peatükk Marsi ajaloo raamatus.

“Uurides Mt. Terav on põnev, "sõnas Vasavada," ja me üritame säilitada segu tõeliselt suurte avastuste vahel, mis - vihkad öelda - aeglustavad meid ja tõusevad mäele kõrgemale. Teie ees oleva kivi tähelepanelik vaatamine tähendab, et te ei saa kunagi üle minna ja vaadata seda teist huvitavat kalju seal. "
Nii Vasavada kui ka Morookian ütlesid, et selle tasakaalu säilitamine iga päev on väljakutse - leida nn n-ö põlv kurvis või nn magus koht täiuslikuks optimeerimiseks sõidu ja teaduses peatumise vahel.
Siis on tasakaal selle vahel, et lõpetame kõigi instrumentidega täieliku vaatluse ja "lendlende", kui tehakse vähem intensiivseid vaatlusi.
"Me võtame vaatlused, mida saame, ja genereerime reaalajas kõik hüpoteesid, mida me suudame," ütles Vasavada. "Isegi kui meil jääb 100 lahtist küsimust, teame, et suudame neile küsimustele hiljem vastata, kui teame, et oleme piisavalt andmeid võtnud."
Uudishimu peamine eesmärk pole tippkohtumine, vaid selle asemel umbes 1330 jala (400 meetrit) ülespoole jääv piirkond, kus geoloogid loodavad leida piiri kivide vahel, mis nende ajaloos nägid palju vett, ja nende vahel, mis seda ei teinud. See piir annab ülevaate Marsi üleminekust märjalt planeedilt kuivale, täites olulise lünga planeedi ajaloo mõistmisel.

Keegi ei tea tegelikult, kui kaua uudishimu kestab või kui see üllatab kõiki nagu tema eelkäijad Vaim ja Võimalus. Olles möödunud ühe aasta Marsil (kaks Maa-aastat) peamisest missioonist ja nüüd laiendatud missioonil, on üks suur muutuja RTG jõuallikas. Ehkki saadaolev võimsus hakkab pidevalt vähenema, ei usu nii Vasavada kui ka morookian, et see peaks olema probleemiks veel vähemalt neli Maa-aastat ja õige “turgutava” energia korral võib see kesta kümmekond aastat või rohkem.
Kuid nad teavad ka, et pole mingit võimalust ennustada, kui kaua Curiosity läheb või mis ootamatu sündmus võib missiooni lõpetada.
Koletis
Kas Curiosityl on isiksust nagu eelmistel Marsi roveritel?
"Tegelikult ei, me ei näi antropomorfiseerivat seda teed nagu inimesed tegid seda vaimu ja võimaluse abil," sõnas Vasavada. „Me pole sellega emotsionaalselt seotud. Sotsioloogid on seda tegelikult uurinud. ” Ta raputas lõbustatud naeratusega pead.
Vasavada teatas, et sellel võib olla Curiosity suurusega mingit pistmist.
"Ma pean seda hiiglaslikuks metsaliseks," ütles ta otsekohese näoga. "Aga mitte üldiselt."

Selle missiooni iseloomustamiseks on Vasavada sõnul olnud selle keerukus igas mõõtmes: inimlik komponent - 500 inimest tööle ja koos tegema, optimeerides samas kõigi andeid; roveri ohutu ja tervislikuna hoidmine; ja hoiab iga päev tööl kümme instrumenti, mis mõnikord teevad täiesti seosetuid teaduseülesandeid.
"Iga päev on meie enda väike" seitse minutit terrorit ", kus igal päeval peab nii palju asju käima," sõnas Vasavada. „Võimalikke probleeme ja koostoimeid on miljon ja peate pidevalt mõtlema kõigile viisidele, kuidas asjad võivad valesti minna, sest seal on miljon võimalust, kuidas midagi segamini ajada. See on keeruline tants, kuid õnneks on meil suurepärane meeskond. ”
Siis lisas ta naeratades: "See missioon on põnev, isegi kui see on metsaline."
“Uskumatud lood kosmosest: stseenide pilk missioonidele, mis muudavad meie vaadet kosmosele” on avaldatud Macmillani tütarettevõttes Page Street Publishing.