Uue Juno roveri prototüüp, 300-kilone rover mis on ette nähtud Marsile või Kuule. Krediit: CSA
Kanada kosmoseagentuur on tuntud oma robootika poolest, kuid nad on hiljuti laienenud robotrelvadest prototüüpide ehitamiseks viiele uuele roverile, mis on kavandatud tulevasteks Kuu ja Marsi missioonideks. Need ulatuvad mikrotöötlusest kuni täismõõdus teadusmissioonideni ja suurusega 30 kg kuni 900 kg. Neist suurim, Lunar Exploration Light Rover, on mõeldud teaduslikule koormale kandmiseks ja sellele saab paigaldada robotkäe. Selle vahemaa on 15 km, seda saab juhtida kaugjuhtimisega või kasutada astronautide vedamiseks üle planeedi pinna.

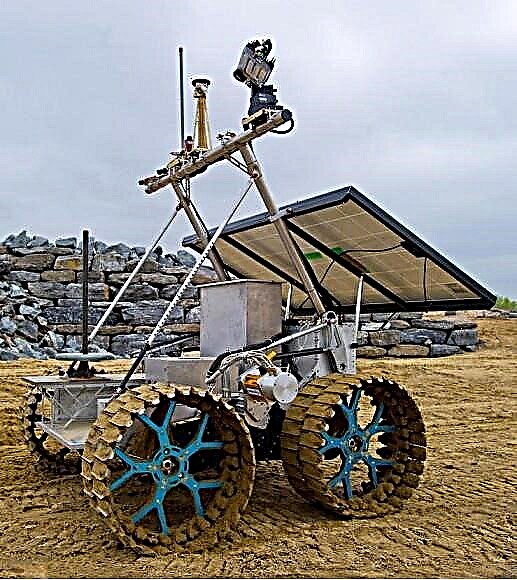
Rehvidega Juno roveri versioon. Krediit: CSA
Kaks Micro-Roveri prototüüpi, kaaluga 40 kg ja 30 kg, on mõeldud kasutamiseks koos suuremate roveritega ning neid saab nende külge kinnitada ja langetada muidu ligipääsmatutesse kohtadesse.
"Kuul pakuvad püsivalt varjutatud kraatrid vee ja muude lenduvate ainete leidmiseks palju huvitavaid alasid," rääkis Kanada kosmoseagentuuri kosmoseuuringute arendusdirektor Jean-Claude Piedboeuf kosmoseajakirjale. Nendel kraatritel on järsud kallakud, mis muudavad suure roveri jaoks raskeks ja riskantseks. Seetõttu annab ema külge kinnitatud mikroklambri saatmine meile võimaluse minimaalse riskiga nende kraatrite põhja uurida. Ainult mikro-roveri saatmine võiks olla võimalus. Kuid need on väga aeglased, nii et tõhusam on neid suuremal roveril katta, et katta pikk vahemaa ja vajadusel neid kasutusele võtta. ”
Mikrokärusid saab kasutada ka astronautide kõrval töötamiseks, et pääseda väikestesse ruumidesse nagu koopad.
Roverid peaksid olema umbes 2020. aastaks missioonivalmis ja NASA on sellest juba huvitatud. Enamik Marsile ja Kuule tehtavaid missioone on seotud geoloogiaga ja tulevikus kaevandamisega. NASA kaalub näiteks eksperimenti, mis hõlmab Kuu pinnase kaevamist ning sellest vesiniku ja hapniku eraldamist. Need kujundused on mõeldud sobima seda tüüpi tegevustega.
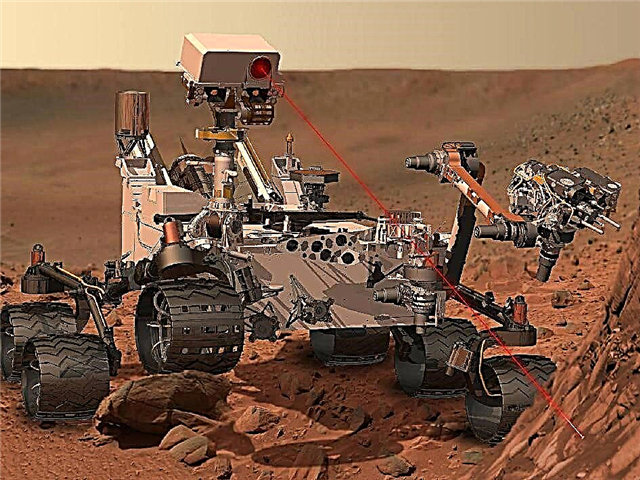
Kosmoserobootika tehnoloogia on kanadalaste jaoks juba pikka aega olnud uhkus, Canadarm oli kosmosesüstikute armatuur ja võimaldas teha näiteks satelliite nagu Hubble'i kosmoseteleskoop. CSA ehitas ka hiiglasliku Canadarm 2 ja Dextre, ülitugeva kaherelvalise roboti, mis mõlemad asuvad rahvusvahelises kosmosejaamas. Veel hiljuti panustas CSA robotkäe ja muu varustuse Curiosity - NASA uusima roveri - Marsile maanduda.
Artemis on kerge maapealne prototüüp, mida saab kasutada kas inimene, kes asub läheduses või kaugemas kohas, või saab selle pardal olevaid andureid oma keskkonna skannimiseks ja navigeerimiseks ilma inimese operaatori vajaduseta. Krediit: CSA
Uued roveri kujundused täiendavad Kanada kosmoserobootika peent liini. Kui nad on lähetatud missioonidele Kuule või Marsile, võivad nad lõpuks Canadarmi ja Dextre'i küünarnukist välja tõmmata. Kui nad võtavad keskpunkti, ei kahjusta ükski tunne. Roverite väljatöötamisega on seotud paljud samad inimesed, kes töötasid Canadarmi ja Dextre'i kallal.
"MDA (MacDonald, Detwiler ja Associates) oli Canadarmi ja Dextre'i peatöövõtja ning ta on peamine kolme rover-prototüübi osas," ütles Piedboeuf.
Nende rover-prototüüpide abil on CSA vältinud seda, et roverite kujundamine oleks kõigile sobiv.
"Kanada tööstuses CSA jaoks välja töötatud laevastik hõlmab meie kavandatud rakenduste valikut ja meie rahvusvahelised partnerid võtavad selle vastu," ütles Piedboeuf.
Kuigi CSA ei näe ette ühtegi muud roveri kujundust, võiksid need 5 prototüüpi keskenduda „konkreetsematele rakendustele, nagu in situ ressursside kasutamine või teadus“, selgitas Piedboeuf.
Kui leiate 5 uue roveri prototüübi tutvustamise põnevaks, olete heas seltskonnas.
"Inimesed tööstuses, akadeemilistes ringkondades ja CSA-s tegutsesid põnevusega nende kanderakettide arendamisel, mis võiksid ühel päeval olla Kuul või Marsil," ütles Piedboeuf. "Suureks motivatsiooniks oli võimalus töötada väljakutsuvate nõuete ja täiustatud autonoomiaga kosmosesõidukite prototüüpide kallal."
CSA veebisaidil saate vaadata rohkem pilte ja teavet roveripargi kohta.