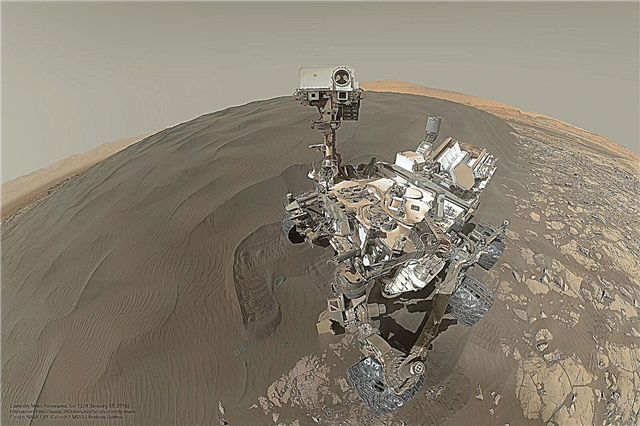
Kuigi mõned meist võivad praegu unistada vaid varvaste liiva sisse kleepimisest, teeb Curiosity rover seda tegelikult. Kuid see pole roveri jaoks puhkus, kuna ta on teel läbi väga ebatavaliste ja silmatorkavate liivaluidete Marsil. Bagnoldi luideväli asub Mt. loodeküljel. Sharp - Curiosity on oma missiooni peamine eesmärk - ja see on esimene kord, kui meil on olnud võimalus teha aktiivsete liivaluidete lähiümbruse uuringuid ka mujal peale Maa.
Tänu Andrew Bodrovile, kes jagas oma 57-pildilisest mosaiigist selfie koostamist ja saate allpool asuva interaktiivse versiooniga ringi liikuda, et näha suurepäraseid vaateid luidetele. Pildid on teinud roveri Mars Hand Lens Imager (MAHLI) saidil Sol 1228 (19. jaanuar 2016).
Marsi panoraam - uudishimu rover: Marsi päikesepäev 1228
Luidete proovide võtmine SAM-iga
Ehkki rover peatus nende piltide tegemisel, et luua see 57-pildi mosaiik „selfie”, on uudishimu olnud ka üsna hõivatud: nii luidetel liikudes kui ka proovide tegemiseks. Põnevalt kühveldas rover osa liivast ja saatis selle pardakeemialaborisse, proovide analüüsi Marsile (SAM). See on alles teine kord, kui kühvelit kasutatakse väikeste portsjonite - tavaliselt umbes poole beebi aspiriini suuruse - manustamiseks; Roveri puurit on proovide saamiseks mitu korda kasutatud.
Curiosity skooris oma esimese luiteproovi 14. jaanuaril, kuid rover jäi korraks oma ratta sisse, raputades seda rattaga. "Kährik aitas anda meile kindlustunde, et meil on piisavalt liiva, kus kühveldame, et kühveli tee ei jõuaks liiva alla maapinnale," ütles Michael McHenry, kes on nende proovide kogumise planeerija.
Mul oli võimalus umbes kaks nädalat tagasi külastada JPL-i Curiosity juhitavat roveri planeerimise meeskonda John Michael Morookianiga ja ta ütles, et plaan oli sõita koplisse lühikese vahemaa tagant, kühvliga proove hankida ja kohale toimetada. katsed pardal.
Morookian selgitas, et Mars Reconnaissance Orbiteril asuva HiRISE kaamera orbitaalkujutiste põhjal teab meeskond, et roveri navigeerimiseks on luidete vahel hea tee ning rover ei tohi ohtu jääda või kinni jääda.
"Uurime neid ringi, teed on palju," sõnas ta. „See ei ole möödapääsmatu valdkond. Rover asub selles konkreetses kohas proovivõtuga umbes jaanuarikuu jooksul ning praegune plaan on läbida luidete vahel umbes kilomeetri pikkune tee, et pääseda vähem aktiivsetele luidetele, mis on osa samast luideväljast. ”
Proovide toomine kühvel SAM-i hõlmab mitmekambrilise seadme keerukate käikude komplekti roveri käsivartel, suunates materjali läbi sõela, kus sõeluti välja osakesi, mis on suuremad kui 150 mikronit (0,006 tolli); osa sõela läbinud materjalist tilgutati seadme „portsjonist” laboratoorsetesse sisselaskeavadesse.
“Alustame vibratsiooni ja kallutame kühve järk-järgult,” selgitas Morookian. "Materjal voolab kühve otsast rohkem voolu kui korraga."
Sõelaga blokeeritud materjal visatakse maapinnale.
Ryan Andersoni sõnul Curiosity meeskonnast dokumenteerivad nii rover Mastcam kui ka MAHLI kaamerad põhjalikult kühveldamisprotsessi ning Mastcam jälgib ka kühveldamisest järele jäänud prügihunnikuid ning ChemCam võtab vaiade passiivseid spektreid . Samuti pildistab Mastcam mitu korda luidet “Hebron”, et jälgida luide muutusi, kui rover on läheduses.
Lisateavet Curiosity hiljutiste tegevuste kohta saate ajakirjast Martian Chronicles ja sellest JPL-i artiklist.
Ja kui teil on küsimus, miks roveri käsi ei ilmu autoportreede mosaiikides, lugege meie eelmist artiklit, milles seda selgitatakse.