Kui olete vaadanud kõrge eraldusvõimega HiRISE pilte Mars Reconnaissance Orbiterilt või teil on olnud võimalus uurida uut Google Marsi, siis teate, et Marss on täis kraatreid, mägesid, kajakaid ja igasuguseid huvitavaid - ja ohtlikke - maastikke . Sellised alad, kus asuvad kihilised ladestused, setted, purunemine ja purunemine, on just seda tüüpi kohad, kus otsida Marsil toodetava metaani allikaid. Kuid meie praeguse stiili, sealhulgas 2011. aasta Marsi Teaduslabori (MSL) saatmine reeturlikule maastikule on liiga riskantne. Kuid JPL-i insenerid koos California tehnoloogiainstituudi tudengitega on kavandanud ja testinud mitmekülgset väikese massiga robotit, mida saaks lisada suurematele roveritele, näiteks MSL-ile, mis suudab kaljudest eemale tõrjuda, mööda järsku ja kivist maastikku liikuda ning uurida sügavad kraatrid.
See prototüüp-rover, mida nimetatakse Axeliks, võib aidata tulevastel robotkosmoselaevadel paremini uurida ja uurida võõraid maailmu, näiteks Marsi. Maal võib Axel olla abiks otsingu- ja päästeoperatsioonides.
"Axel laiendab meie võimalusi uurida maastikke, mida meil pole varem olnud võimalik uurida, näiteks vertikaalse kaldega esiosaga sügavad kraatrid," ütles Axeli juhtiv uurija Issa A. D. Nesnas JPLi robootika ja liikuvuse sektsioonist. „Kuna Axel on suhteliselt väikese massiga, võib missioon vedada mitmeid Axeli sõidukeid. See annaks meile võimaluse olla uuritava maastiku suhtes agressiivsem, säilitades samas üldise riski juhitavuse. "
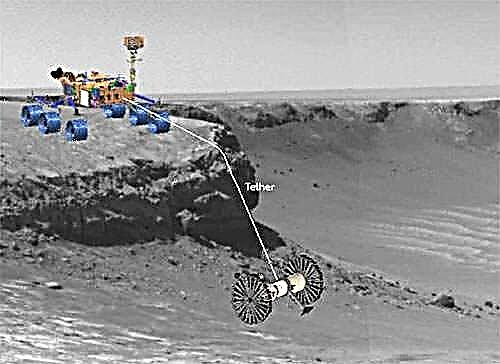
Nesnase sõnul on Axel nagu yo-yo - see asub suurema roveri külge kinnitatud jalal ja võib minna kraatrite, kanjonite ja kajakate külgedele üles ja alla, uurides piirkondi, mis pole teistele roveritele ohutud.

Axeli lihtsas ja elegantses konstruktsioonis, mis suudab töötada nii tagurpidi kui ka paremal küljel ülespoole, kasutatakse ainult kolme mootorit: üks nende kahe ratta juhtimiseks ja kolmas kangi juhtimiseks. Kang sisaldab kühve, mille abil teadlased saavad uurida kuu- või planeedimaterjali, ja see reguleerib ka roboti kahte stereokaamerat, mis võivad kalduda 360 kraadi.

Axeli silindrilisel korpusel on arvuti- ja traadita side võimalused ning autonoomselt töötamiseks inertsiaalne andur. See ühendab ka lõasta, millest Axel saab lahti laskuda, kui ta laskub suuremalt maandurilt, roverilt või kinnituspunktist. Rover võib kasutada erinevat tüüpi rattaid, alates suurtest kokkupandavatest ratastest kuni täispuhutavateni, mis aitavad roveril taluda kõva maandumist ja käia kivisel maastikul.
Axel on arenduses olnud alates 1999. aastast ning Caltechi, Purdue ülikooli ja Arkansase tehnikaülikooli tudengid on aastate jooksul teinud selle mitmekülgse roveri väljatöötamiseks koostööd JPL-iga.
Lisateavet Axeli kohta leiate JPL-i Axeli lehelt ja Caltechi Axeli-veebisaidilt.