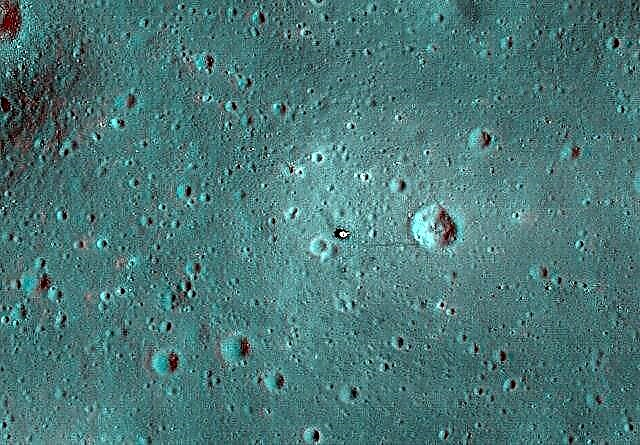
Rahvusvahelise kosmosejaama pardal olevad astronaudid kasutasid jaama robotkätt Itaalia ehitatud Harmoonia mooduli (teise nimega Node 2) viimiseks täna oma lõplikku asukohta. See on nüüd ühendatud USA saatuse laboratooriumi ettepoole suunatud sadamaga, luues teed peatsesse Euroopa Columbuse laborisse.
Harmony moodul toimetati jaama ajal Avastused on hiljutine STS-120 missioon. Missiooni esimese kosmoseteekonna ajal ühendati moodul Harmoonia ajutiselt mooduliga Unity.
Pärast Avastus naasnud Maale, kolis Expedition 16 meeskond kosmosesüstiku dokipordi PMA2 oma praegusest asukohast Destiny moodulil Harmony mooduli lõppu.
Kuna kogu see sadam oli paigast ära, kasutas astronaut Daniel Tani jaama Canadarm2 robotkätt, et viia Harmony (ja sellele lisatud dokkimisport) oma lõplikku koju, otse ISS-i ette. Siit dokkib edasi-tagasi buss.
Harmoonia on liigutatud, kuid selle täielikuks varustamiseks peavad astronaudid veel 20. ja 24. novembril läbima veel kaks kosmoseteekonda.
Kosmosesüstiku järgmine käivitamine Atlantis, mis on suunatud 6. detsembriks, toob jaama Euroopa Columbuse labori. STS-122 astronaudimeeskond viib läbi kosmoseradasid, et ühendada moodul Harmoonia mooduli parempoolse küljega.
Algne allikas: ESA pressiteade