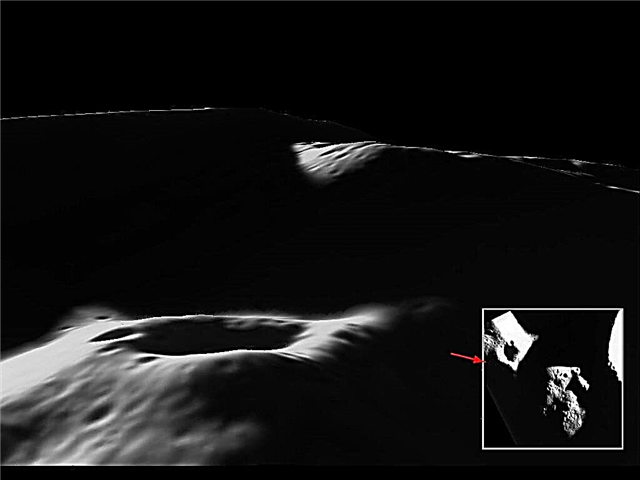
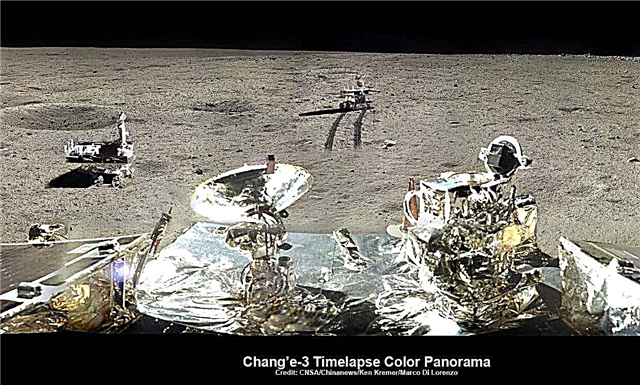
Chang’e-3 / Yutu Timelapse Color Panorama
See äsja laiendatud timelapse komposiitvaade näitab Hiina Yutu kuu liikumist kahes positsioonis, mis möödub kraatrist ja suundub lõunasse ja eemale Chang'e-3 Kuu maandumiskohast igavesti umbes nädal pärast detsembrit. Vaadake siin olevat 360-kraadise maandumiskoha timelapse'i panoraami ja APOD 3. veebruar 2014. Chang'e-3 madal ultraviolettkaamera (EUV) on paremal, antenn vasakul. Krediit: CNSA / Chinanews / Ken Kremer / Marco Di Lorenzo - kenkremer.com.
Vaadake meie täielikku Yutu timelapse pano NASA APOD-is 3. veebruaril 2014: http://apod.nasa.gov/apod/ap140203.htm[/caption]
KENNEDY RUUMIKESKUS, FL - Hiina neiukuu rover Yutu ärkas reedel, 14. märtsil tavapärasest kahenädalasest unest, et alustada 4. Kuu päeva, kuna sondid on 2013. aasta detsembri keskel Maa lähima naabri pinnal maandunud.
Kuid armastav robot on endiselt vaevatud ja kannatab mehaaniliste juhtimisprobleemide pärast, mis Hiina kosmoseametnike sõnul ilmnesid 2014. aasta jaanuari lõpus.
Chang’e-3 emalaeva maandur, mis lasi Yutu jäljendatud kuu pinnale, ärkas ka kaks päeva varem, kolmapäeval, 12. märtsil.
"Yutu ja maabija on oma operatsioone taaskäivitanud ja uurivad plaanipäraselt," ütles Hiina riigikaitse teaduse, tehnoloogia ja tööstuse riikliku administratsiooni (SASTIND) andmetel, kes vastutab missiooni Chang’e-3 läbiviimise eest.

Yutu on Hiina kõigi aegade esimene Kuu-teekond ja saavutas 14. detsembril 2013 edukalt pehme maandumise Kuule, Chang’e-3 emaslooma maandumisplatsi tagant piggybaked.
Kuid "kontrollküsimused, mis on Yutu alates jaanuarist vaevanud, jäävad alles," väidab Hiina valitsusele kuuluv uudisteagentuur Xinhua.
Ülimalt populaarse 'Yutu' roveri all kannatab endiselt võimetus oma elu päikesepaneelide abil manööverdada. Samuti ei suuda see oma kuut ratast aktiveerida ja pinnal liikuda - nagu ma siin teatasin.
Ajal, mil Yutu teine Kuu uneperiood algas 25. jaanuaril 2014, olid Hiina kosmoseametnikud teatanud, et roboti tulevik on ohus pärast seda, kui ta kannatas tundmatu "mehaanilise juhtimise anomaalia" tõttu "keeruka Kuu pinna".

Selle kuu alguses teatas Hiina, et „Yutu kannatas oma juhtimispuldis juhtimisahela talitlushäireid.“
"Juhtimisahela probleem takistas Yutu sisenemast plaanipäraselt teise puhkeolekusse," ütles Chang’e-3 programmi vanemteadur Ye Peijian Xinhuale antud eksklusiivintervjuus.
Rovers-masti langetamiseks ja masti paigaldatud delikaatsete komponentide ja instrumentide kaitsmiseks Kuu korduvate öiste ööperioodide eriti karmi külma eest otseselt kaitsmise eest on vaja toimivat juhtimisahelat.
"Tavaline puhkeseisund vajab Yutu masti ja päikesepaneelide voltimiseks," ütles Ye Hiina riikliku ringhäälinguorganisatsiooni CCTV teatel.
Õnneks töötavad panoraamkaamera, radar ja muud teaduslikud instrumendid ning seadmed normaalselt, vahendab SASTIND.
Yutu lõi 3. kuu ajal isegi vähemalt paar uut pilti maandurist.
Vaadake meie Yutu kolmapäevase 3. kuupäeva pilti ja selle täielikku 360-kraadist timelapse värvilist panoraami 1. Kuupäevast ja NASA APOD-ist 3. veebruaril 2014 - kokkupannud Marco Di Lorenzo ja Ken Kremer.

14. märtsil uuesti ärgates jäi 140 kg kaaluv robot ellu ka oma kolmekuulise eluea jooksul Kuul.
Yutu eesmärk on viia läbi eksklusiivne ekspeditsioon Kuu pinna koostise ja loodusvarade uurimiseks.
Siiani töötab 1200-kilogrammine Chang’e-3 maandur plaanipäraselt esimese kolme kuusepäeva jooksul, vahendab SASTIND.
"Landeri optiline teleskoop, äärmuslik ultraviolettkaamera ja kuutolmu mõõtmise seade täitsid plaanipäraseid ülesandeid ja kogusid palju andmeid," väidab Hiina valitsusele kuuluv Xinhua uudisteagentuur.
Hiina on alles 3. riik maailmas, kus pärast Ameerika Ühendriikide ja Nõukogude Liitu on Maa lähim naaberriik kosmoselaeva edukalt mahedaks lasknud.
Olge kursis Ken'i jätkuvate Chang’e-3, Orioni, Orbital Sciences, SpaceXi, äriruumi, LADEE, Marsi ja muude planeetide ja inimeste kosmoselennude uudistega. Lisateave Keni eelseisvatel ettekannetel NEAFi kosmosekonverentsil 12. aprillil 2013.