„Need, kes on inspireeritud muust kui loodusest, armuke ennekõike meistrid, töötavad asjata.”
-Leonardo da Vinci
See, mida DaVinci rääkis, ehkki tol ajal seda veel ei nimetatud, oli biomimikri. Kui ta täna elus oleks, pole kahtlust, et hr DaVinci oleks biomimikri suur pooldaja.
Loodus on seda põnevam, mida sügavamalt seda uurite. Kui vaadata loodust sügavalt, siis piilume üle 3 miljardi aasta vanusesse laborisse, kus evolutsiooni käigus on probleemide lahendusi rakendatud, katsetatud ja läbi vaadatud. Seetõttu on biomimikri nii elegantne: Maakeral on loodusel olnud probleemide lahendamiseks rohkem kui 3 miljardit aastat - sama tüüpi probleemid, mida peame lahendama kosmoseuuringute edendamiseks.
Mida võimsamaks meie tehnoloogia saab, seda sügavamale võime loodusesse pääseda. Nagu üksikasjalikumalt selgitatakse, esinevad inseneriprobleemide kiuslikumad lahendused. Teadlased, kes otsivad looduse poole lahendusi inseneri- ja disainiprobleemidele, on hüvesid teenimas ja astuvad sammu mitmes kosmoseuuringutega seotud valdkonnas.
Lehvivad tiibadega mikroõhusõidukid (MAV)
MAV-id on väikesed, tavaliselt mitte suuremad kui 15 cm ja kaalu 100 grammi. MAV-id pole mitte ainult väikesed, vaid ka vaiksed. Mis on varustatud keemiliste nuusutajate, kaamerate või muu varustusega, saab neid kasutada piiratud juurdepääsuga ruumide uurimiseks, mis on inimese jaoks ligipääsetavad, või igas suuruses alade salajaseks uurimiseks. Maapealne kasutamine võib hõlmata pantvangiolukordi, Fukushima taoliste tööõnnetuste hindamist või sõjalist kasutamist. Kuid kõige põnevam on nende potentsiaalne kasutamine teistes maailmades, mida tuleb veel uurida.
MAV-id on aastate jooksul ilmunud ulmeraamatutes ja filmides. Mõelge jahimeestele Dune'is või Prometheuse sondidele, mida kasutati inimese ees oleva kambri kaardistamiseks. Need disainilahendused on arenenumad kui kõik, mille kallal praegu töötatakse, kuid lendlevate tiivikutega MAV-e uuritakse ja kavandatakse praegu ning need on tulevikus edasijõudnumate kujunduste eeldajad.
Kiirkaamerad on õhutanud lendlevate tiivasõidukite arendamist. Kiirete kaamerate detailsed pildid on võimaldanud teadlastel lindude ja putukate lendu väga detailselt uurida. Ja nagu selgub, on tiibu lennutamine palju keerulisem, kui algul arvati. Kuid see on ka palju mitmekülgsem ja vastupidavam. See seletab selle püsivust looduses ja MAV-disaini mitmekülgsust. Siin on mõni video kiirkaamerast, mis jäädvustab lennu ajal mesilasi.
Delfti Tehnikaülikooli DelFly Explorer on üks põnev tiib-tiivas MAV-i kujundus. Selle väike ja kerge stereovisioonisüsteem võimaldab vältida takistusi ja säilitada oma kõrgust.
Lehvivad tiibadega MAV-id ei vaja raja läbimist. Neil on ka see eelis, et nad saavad energia säästmiseks väikestes ruumides ahvenaid teha. Ja neil on potentsiaal olla väga vaikne. Selles videos on näidatud lendleva tiivaga sõidukit, mida arendab Airvironment.
Klapitavad tiivulised MAV-id on väga manööverdatavad. Kuna nad tõstavad tõste pigem tiibu liikumise, mitte edasiliikumise tõttu, saavad nad liikuda väga aeglaselt ja isegi hõljuda. Nad saavad isegi takistustega kokkupõrgetest taastuda viisil, mida fikseeritud tiiva või pöörleva tiiva MAV-id ei suuda. Kui fikseeritud tiivasõiduk millegagi kokku põrkub, kaotab see oma kiiruse ja tõste. Kui pöörleva tiivaga sõiduk põrkub millegagi kokku, kaotab see rootori kiiruse ja tõste.
Väikese suuruse tõttu on lendleva tiibuga MAV-e tõenäoliselt odav toota. Nad ei saa kunagi kanda kasulikku koormat, mida suurem sõiduk suudab, kuid neil on oma roll teiste maailmade uurimisel.
Robotsondid on kogu uurimise teinud meie jaoks teistes maailmades palju odavamalt kui inimeste saatmine. Kuigi tiibuvate MAV-ide kavandamisel on praegu silmas peetud maapealset jõudlust, on see piisavalt hõlbus hüpe teiste maailmade ja muude tingimuste jaoks mõeldud kujundusteni. Kujutage ette väikest õhema atmosfääri ja nõrgema raskusastmega õhusõidukiparki, mis vabastatakse koobaste või muude raskesti ligipääsetavate alade kaardistamiseks, vee või mineraalide või muude objektide kaardistamiseks.
Sipelgakolooniad ja kollektiivsed süsteemid

Sipelgad tunduvad meeletult, kui neid eraldi vaadata. Kuid nad teevad koos hämmastavaid asju. Nad mitte ainult ei ehita keerukaid ja tõhusaid kolooniaid, vaid kasutavad ka oma keha ujuvsildade ja keset õhku riputatud sildade ehitamiseks. Seda käitumist nimetatakse enese kokkupanemiseks.
Sipelgate kolooniatel ja sipelgate käitumisel on meile palju õpetada. Ant Colony Optimization on terve uurimisvaldkond, millel on mõju vooluringidele ja süsteemidele, kommunikatsioonile, arvutuslikule intelligentsusele, juhtimissüsteemidele ja tööstuselektroonikale.
Siin on video sellest, kuidas Weaveri sipelgad ehitavad silla kahe riputatud pulga vahelise tühiku katmiseks. Selle saamine võtab neil natuke aega. Vaadake, kas saate vaadata ilma neid rõõmustamata.
Sipelgate kolooniad on üks näide nn kollektiivsetest süsteemidest. Teised näited looduses esinevatest kollektiivsetest süsteemidest on mesilaste ja herilaste tarud, termiidimäed ja isegi kalakoolid. Järgmises videos olevad robotid on loodud loomulike kollektiivsete süsteemide jäljendamiseks. Need robotid saavad üksi väga vähe hakkama ja on altid vigadele, kuid koos töötades on nad võimelised ise keerukateks kujudeks kokku panema.
Isekomplekteeritavad süsteemid võivad muutuvate tingimustega paremini kohaneda. Kui on vaja uurida teisi maailmu, siis robotid, mis saavad ise kokku panna, suudavad reageerida ootamatutele muutustele nende ümbruses ja teiste maailmade keskkondades. On kindel, et kollektiivsete süsteemide poolt ise monteerimine võimaldab meie tulevastel robotiuurijatel liikuda keskkondadest läbi ja üle elada olukordi, mida me ei saa nende jaoks ette näha. Neil robotitel pole mitte ainult tehisintellekti, et mõelda läbi probleemide, vaid nad saavad ka takistuste ületamiseks ise ennast erinevatel viisidel kokku panna.
Loomadele modelleeritud robotid
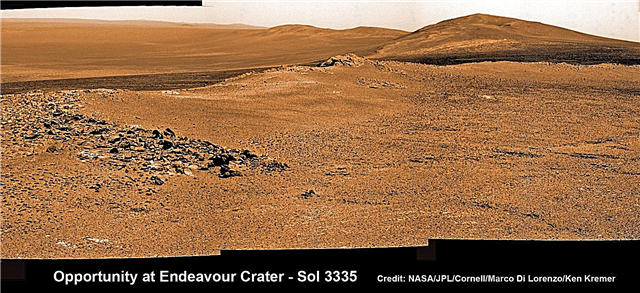
Marsi uurimine robotkärudega on hämmastav saavutus. Mul tekkisid külmavärinad, kui Curiosity Marsile maandus. Kuid meie praegused roverid näivad rabedad ja haprad ning nende liikumine aeglaselt ja kohmakalt ümber Marsi pinna paneb mõtlema, kui paremad nad tulevikus võiksid olla. Kasutades biomimikrit loomadel robotitega roverite modelleerimiseks, peaksime suutma ehitada palju paremaid vaguneid kui meil praegu on.
Rattad on inimkonna üks varasemaid ja paremaid tehnoloogiaid. Kuid kas meil on Marsil isegi rattaid vaja? Rattad takerduvad, ei suuda järskudest kõrguse muutustest mööda pääseda ja neil on muid probleeme. Looduses rattaid pole.
Maodel on liikumisprobleemidele oma ainulaadne lahendus. Nende võime liikuda üle maa, takistustest üles ja üle, pigistada läbi kitsaste kohtade ja isegi ujuda muudavad nad väga tõhusateks kiskjateks. Ja ma pole kunagi näinud katkise letti ega katkise teljega madusid. Kas tulevasi rändureid saaks modelleerida maapealsetele madudele?
See robot liigub üle põranda samamoodi nagu maod.
Siin on veel üks madude baasil töötav robot, millele on lisatud võimalus vees vees olla. See näeb välja nagu naudiks ennast.
See robot ei põhine mitte ainult maodel, vaid ka tolmuussidel ja putukatel. Sellel on isegi ise kokkupanemise elemente. Rattad hoiaksid seda ainult tagasi. Mõnes segmendis võiksid kindlasti olla andurid ja see võib proovide kogumiseks isegi analüüsi teha. Vaadake, kuidas see takistuste ületamiseks end uuesti kokku võtab.
Piisavalt lihtne on mõelda madu robotite mitmekordseks kasutamiseks. Kujutage ette suuremat platvormi, mis sarnaneb MSL Curiosityga. Kujutage nüüd ette, kui selle jalad oleksid tegelikult mitmed iseseisvad madu robotid, mis võiksid eralduda, täita selliseid ülesandeid nagu raskesti ligipääsetavate piirkondade uurimine ja proovi võtmine, seejärel naasta suuremale platvormile. Seejärel deponeeriksid proovid, laadiksid andmed alla ja kinnitaksid end uuesti. Siis võis kogu sõiduk liikuda teise kohta, kus madu robotid kandis platvormi.
Kui see kõlab nagu ulme, siis mis siis? Me armastame ulmet.
Päikeseenergia: päevalilled kosmoses
Päikesest tulev energiavool lahjendatakse kaugemale Päikesesüsteemist, kuhu me läheme. Kuigi päikeseenergia kogumine on meil järjest tõhusam, pakub biomimikritunne päikesepaneeli vajaliku ruumi vähendamist 20%, lihtsalt päevalille matkides.
Kontsentreeritud päikeseenergia taimed (CSP-d) koosneb peeglite massist, mida nimetatakse heliostaatideks ja mis jälgivad Päikest Maa pöörlemisel. Heliostaadid on paigutatud kontsentrilistesse ringidesse. Nad püüavad päikesevalgust ja peegeldavad seda kesktorni poole, kus soojus muundatakse elektriks.
Kui MIT-i teadlased CSP-sid lähemalt uurisid, avastasid nad, et iga heliostaat veetis osa ajast varjutatud, muutes need vähem efektiivseks. Probleemi lahendamiseks arvutimudelitega töötades märkasid nad, et võimalikud lahendused sarnanesid looduses leiduvate spiraalimustritega. Sealt vaatasid nad inspiratsiooni saamiseks päevalille.

Päevalill ei ole üksik lill. See on väikeste lillede kogumik, mida nimetatakse florettideks, sarnaselt CSP üksikute peeglitega. Need floretid on paigutatud spiraalmustrina, kusjuures iga floret on suunatud üksteise suhtes 137 kraadi. Seda nimetatakse kuldnurgaks ja kui floretid on niimoodi paigutatud, moodustavad need omavahel ühendatud spiraalide massiivi, mis vastab Fibonacci järjestusele. MIT-i teadlaste sõnul vähendab üksikute peeglite korraldamine CSP-s samal viisil vajalikku ruumi 20%.
Kuna me paigutame kosmose uurimiseks kõik vajaliku kosmosesse, lõhkades selle Maa gravitatsioonist välja ja haaratakse hästi tohutute, kallite rakettidega, on ruumi koguse vähendamine 20% sama koguse päikeseenergia koguse jaoks oluline edasiminek.
Extremophiles ja biomimicry
Extremofiilid on organismid, mis on kohanenud ekstreemsetes keskkonnatingimustes edukaks. 2013. aasta seisuga on tuvastatud 865 ekstremofiilset mikroorganismi. Nende tunnustamine on andnud uut lootust leida elu teistest maailmadest ekstreemsetes keskkondades. Kuid lisaks sellele võib ekstremofiilide matkimine aidata meil neid keskkondi uurida.

Rangelt võttes pole Tardigraadid just ekstremofiilid, sest kuigi nad suudavad äärmustest üle elada, ei ole nad kohanenud nende õitsenguks. Kuid nende võime taluda keskkonna äärmusi tähendab, et neil on meile palju õpetada. Tardigraade on umbes 1150 liiki ja neil on võime ellu jääda tingimustes, mis tapavad inimese, ja halvendavad kiiresti kõigi robotide sondide tööd, mida võime saata äärmuslikku keskkonda.
Tardigraadid on tegelikult pisikesed, veelised, kaheksajalgsed mikroloomad. Nad taluvad temperatuuri veidi üle absoluutse nulli kuni vee keemistemperatuurini. Nad suudavad üle elada survet, mis on umbes kuus korda suurem kui rõhk Maa sügavaimate ookeanikaevikute põhjas. Tardigraadid võivad kümme aastat minna ka ilma toidu ja veeta ning võivad kuivada vähem kui 3% -ni.
Nad on põhimõtteliselt Maa ülipikad kangelased.
Kuid mis puutub kosmoseuuringutesse, siis huvitab meid kõige enam nende võime taluda tuhandeid kordi suuremat ioniseerivat kiirgust, kui inimesed suudavad taluda. Tardigrade nimetatakse looduse raskeimateks olenditeks ja on lihtne aru saada, miks.
Ilmselt ulmevaldkonnas on ette kujutada tulevikku, kus inimesed on geneetiliselt muundatud tardigrade geenidega, et taluda teiste maailmade kiirgust. Kuid kui elame piisavalt kaua, pole minu meelest kahtlust, et laename teistest maapealsetest eludest geene, mis aitavad meil laieneda teistesse maailmadesse. See on ainult loogiline. Kuid sellest on veel kaugel ja tardigrade ellujäämismehhanismid võivad mängu tulla palju varem.

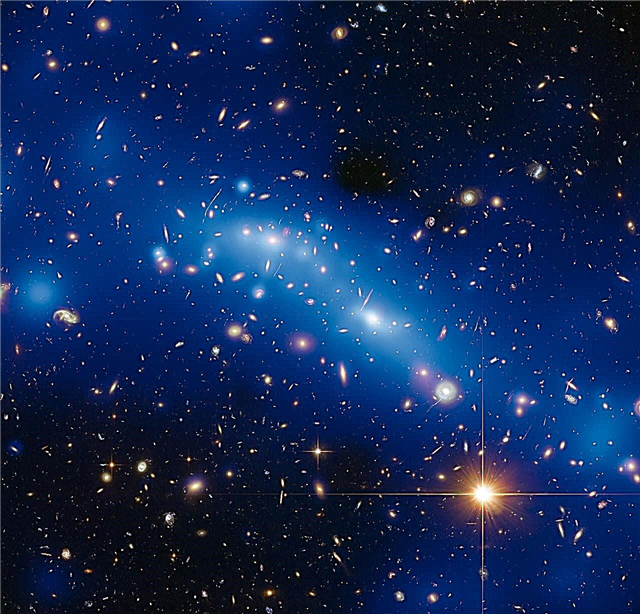
Maaga sarnased maailmad on õnnelikud, et neid varjutab magnetosfäär, mis kaitseb biosfääri kiirguse eest. Kuid paljudel maailmadel ja kõigil meie päikesesüsteemi planeetide kuudel - peale Ganymede - puudub magnetosfäär. Mars ise on täiesti kaitsmata. Kiirguse esinemine kosmoses ja kaitsva magnetosfäärita maailmades mitte ainult ei tapa elusaid asju, vaid võib mõjutada elektroonilisi seadmeid, halvendades nende jõudlust, lühendades nende eluiga või põhjustades täieliku rikke.
Mõne praegu Jupiterisse teel oleva Juno sondil oleva instrumendi puhul ei oodata hiiglasliku gaasiplaneedi ümbruses toimuva äärmusliku kiirguse tõttu missiooni kestel püsimist. Päikesepaneelid ise, mis peavad toimima päikese käes, on eriti vastuvõtlikud ioniseerivale kiirgusele, mis aja jooksul halvendab nende toimimist. Elektroonika kaitsmine ioniseeriva kiirguse eest on oluline osa kosmoseaparaatide ja sondide kujundamisel.
Tavaliselt on kosmoseaparaatide ja sondide tundlik elektroonika varjestatud alumiiniumi, vase või muude materjalidega. Juno-sond kasutab oma kõige tundlikuma elektroonika kaitsmiseks innovaatilist titaanvõlli. See lisab andurile mahu ja kaalu ning ei taga ikkagi täielikku kaitset. Tardigradel on muul viisil end kaitsta, mis on ilmselt elegantsem. On liiga vara öelda täpselt, kuidas tardigraadid seda teevad, kuid kui pigmentatsioonikilpidega on midagi pistmist ja me suudame selle välja mõelda, siis muudab Tardigrade matkimine seda, kuidas me kosmoselaevu ja sondid kujundame, ning pikendab nende eluiga äärmuslikes kiirguskeskkondades.
Kuidas siis sellega oleks? Kas meie tulevaste uurimismissioonidega kaasnevad madurobotid, mis võivad ise pikkadeks ahelateks kokku saada, et uurida raskesti ligipääsetavaid piirkondi? Kas vallandame lendlevate tiivikutega MAVide sülemid, mis töötavad koos üksikasjalike kaartide või vaatluste loomiseks? Kas meie sondid suudavad tänu Tardigrade-laadsele kiirguskaitsele uurida äärmuslikke keskkondi palju pikemat aega? Kas meie esimesed kuused või muud maailmad asuvad meie päevalillest inspireeritud kontsentreeritud päikesetaimede toitel?
Kui Leonardo DaVinci oli nii tark, kui ma arvan, et ta oli, siis on vastus kõigile neile küsimustele jah.