Planeedilised mikrobotid. Pildikrediit: NASA Suurendamiseks kliki pildil
Intervjuu Penny Bostoniga, I osa
Kui soovite reisida kaugete tähtede juurde või leida elu teisest maailmast, võtab see natuke planeerimist. Sellepärast asutas NASA NIAC, NASA täiustatud kontseptsioonide instituudi. Viimased mitu aastat on NASA julgustanud teadlasi ja insenere mõtlema väljaspool kasti, et pakkuda ideid just sellele ulmeküljele. Nad loodavad, et mõni neist ideedest rakendub ja pakub agentuurile tehnoloogiaid, mida ta saab kasutada 20, 30 või 40 aastat.
NIAC pakub rahastamist konkurentsipõhiselt. Kümnest esitatud ettepanekust rahastatakse vaid käputäis. I etapi rahastamine on minimaalne, piisab teadlastele oma idee paberil vormistamiseks. Kui idee näitab teeneid, võib see saada II etapi rahastuse, mis võimaldab uurimist jätkata puhtalt kontseptsioonilt töötlemata prototüübi staadiumile.
Üks projektidest, millele käesoleva aasta II etapp rahastas, oli dr Penelope Bostoni ja dr Steven Dubowsky koostöö „hüppeliste mikroobide” arendamiseks, mis on võimelised uurima ohtlikku maastikku, sealhulgas maa-aluseid koopaid. Kui projekt pankrotistub, võidakse ühel päeval saata mikrobotid Marsi pinna alt elu otsima.
Boston veedab koobastes palju aega, uurides seal elavaid mikroorganisme. Ta on koobaste ja karstide uuringute programmi direktor ja New Mexico Tehnika dotsent Socorros, New Mexico. Dubowsky on MITi väli- ja kosmoserobootika laboratooriumi direktor Massachusettsi osariigis Cambridge'is. Ta on tuntud osaliselt kunstlike lihaste uurimise eest.
Ajakiri Astrobiology küsitles Bostonit vahetult pärast seda, kui ta ja Dubowsky said II faasi NIAC stipendiumi. See on esimene kaheosalisest intervjuust. Ajakiri Astrobiology (AM): Teie ja dr Steven Dubowsky said NIAC-lt hiljuti raha, et töötada välja idee kasutada Marsil maa-aluste koobaste uurimiseks miniatuurseid roboteid? Kuidas see projekt sündis?
Penny Boston (PB): Oleme teinud Maa koobastes üsna palju tööd, et vaadata nende ainulaadsete keskkondade mikroobseid elanikke. Me arvame, et neid saab kasutada mallidena eluvormide otsimisel Marsilt ja teistelt maavälistelt kehadelt. Avaldasin 1992. aastal koos Chris McKay ja Michael Ivanoviga paberi, milles soovitati, et Marsi pinnas oleks viimane planeet elu pelgupaigana, kuna see muutub geoloogilisel ajal külmemaks ja kuivemaks. See pani meid tegelema Maa pinnase uurimisega. Kui me seda tegime, avastasime, et seal on hämmastav hulk organisme, mis on ilmselt maa-alused põlisrahvad. Nad suhtlevad mineraloogiaga ja loovad ainulaadseid biosignatuure. Nii sai sellest meile õppimiseks väga viljakas piirkond.
Isegi sellel planeedil rasketesse koobastesse sattumine pole nii lihtne. Selle tõlkimine maapealseteks robotimissioonideks nõuab mõtlemist. Meil on Marsilt häid pildiandmeid, mis näitavad selgeid geomorfoloogilisi tõendeid vähemalt laavatoruga koobaste kohta. Nii et me teame, et Marsil on vähemalt seda tüüpi koobas, mis võiks olla kasulik teaduslik sihtmärk tulevaste missioonide jaoks. On usutav arvata, et on olemas ka muud tüüpi koopaid ja meil on ajakirjanduses trükis tulevases Ameerika geoloogiaühingu eridokumendis, mis uurib ainulaadseid koopa moodustamise (speleogeneetilisi) mehhanisme Marsil. Suur kleepumispunkt on see, kuidas sellisel rangel ja keerulisel maastikul ringi liikuda.
AM: Kas saaksite kirjeldada, mida te projekti esimeses etapis tegite?
PB: I etapis tahtsime keskenduda robotüksustele, mis olid väikesed, väga arvukad (seega kulukad), suuresti autonoomsed ja millel oli liikuvus, mida oli vaja ebaühtlasele maastikule sattumiseks. Tuginedes dr Dubowsky käimasolevale tööle kunstlike lihaste aktiveeritud robotliigutusega, tuli välja idee paljudest, pisikestest ja väikestest keradest, umbes tennisepallide suurusest, mis sisuliselt hüppavad, peaaegu nagu Mehhiko hüppavad oad. Nad salvestavad lihasenergia, niiöelda, ja siis virgutavad end erinevatesse suundadesse. Nii nad liiguvad.
krediit: Renderdaja: R.D.Gus Frederick
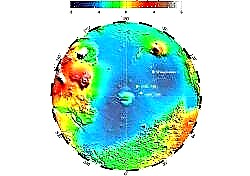
Planeetide seadistamine suuremahuliste planeetide pinna- ja maa-aluste uuringute jaoks. Suurema kuva vaatamiseks klõpsake pildil
Pildikrediit: Renderdaja: R.D.Gus Frederick
Oleme välja arvutanud, et suudame tõenäoliselt pakkida umbes tuhat neist kuttidest kasuliku massi, mis on ühe praeguse MER-i (Mars Exploration Rovers) suurus. See annaks meile paindlikkuse, et kaotada suur osa ühikutest ja ikkagi on olemas võrk, mis võiks teha rekonstrueerimist ja tuvastamist, pildistamist ja võib-olla isegi mõnda muud teadusfunktsiooni.
AM: Kuidas kõik need väikesed sfäärid üksteisega koordineerivad?
PB: Nad käituvad sülemina. Nad seostuvad üksteisega, kasutades väga lihtsaid reegleid, kuid see loob nende kollektiivses käitumises palju paindlikkust, mis võimaldab neil täita ettearvamatu ja ohtliku maastiku nõudmisi. Lõpptulemus, mida me ette kujutame, on nende väikeste kuttide laevastik, kes saadetakse mõnele paljutõotavale maandumisplatsile, väljub maismaalt ja suundub seejärel mõnele maa-alusele või muule ohtlikule maastikule, kus nad ennast võrguna kasutusele võtavad. Nad loovad mobiilsidevõrgu sõlmede vahel.
AM: Kas nad suudavad kontrollida suunda, milles nad hüppavad?
PB: Meil on püüdlusi, et nad lõpuks oleksid väga võimekad. II faasi siirdumisel töötame koos Stanisfordis töötava Fritz Printziga väikeste miniatuursete kütuseelementide kallal, et neid väikseid poisse toita, mis võimaldaks neil teha üsna keerulisi asju. Üks nendest võimalustest on omada mingit kontrolli selle suuna üle, kuhu nad lähevad. Nende ehitamiseks on teatud viise, mis võimaldavad neil eelistatavalt minna ühes või teises suunas. See pole täpselt nii täpne kui oleks siis, kui need oleksid ratastega roverid, mis lähevad lihtsalt sirgele teele. Kuid eelistatavalt saavad nad end enam-vähem suunata sinna, kuhu nad tahavad minna. Nii et me näeme, et neil on vähemalt suurem kontroll juhtimise üle. Kuid suur osa nende väärtusest on seotud sülemiliikumisega kui laienev pilv.
Nii tore, kui MER-i roverid on, vajan sellist teadust, mida ma teen, mis sarnaneb putukaroboti ideega, mille autoriks oli Rodney Brooks MIT-is. Võimalus tutvuda putukate intelligentsuse ja uurimiseks kohanemise mudeliga oli mulle juba ammu meeldinud. Kui lisada dr Dubowsky hüppelise idee ainulaadsele liikuvusele, võib see minu arvates võimaldada mõistlikul protsendil neist väikestest ühikutest üle elada maa-aluse maastiku ohud - see tundus mulle lihtsalt maagilise kombinatsioonina.
HB: Nii et kas I etapis ehitati mõni neist üles?
PB: Ei. I etapp koos NIAC-ga on kuue kuu pikkune aju kurnav ja pliiatsit tõukav uuring, et selgitada välja asjakohaste tehnoloogiate tehnika tase. II etapis teeme kahe aasta jooksul piiratud koguses prototüüpe ja välitesti. See on palju vähem kui see, mida võib tegeliku missiooni jaoks vaja minna. Kuid loomulikult on see NIACi volitus uurida tehnoloogiat 10–40 aasta pärast. Me arvame, et see on tõenäoliselt vahemikus 10–20 aastat.
AM: Milliseid sensoreid või teaduslikke seadmeid te kujutate ette, et saaksite neid asju selga panna?
PB: Kujutis on selgelt asi, mida me tahaksime teha. Kuna kaamerad muutuvad uskumatult pisikesteks ja vastupidavateks, on juba suurusjärgus üksusi, mida saaks nendele asjadele paigaldada. Võimalik, et mõnele seadmele võiks lisada suurendusfunktsiooni, nii et võiks vaadata nende materjalide tekstuure, millele nad maanduvad. Pisikeste kaameratega tehtud piltide integreerimine paljudele erinevatele väikestele üksustele on üks edasise arengu valdkondi. See jääb selle projekti raamest välja, kuid just seda mõtleme pildistamiseks. Ja siis kindlasti keemilised andurid, kes saavad keemilist keskkonda nuusutada ja tunnetada, mis on väga kriitiline. Kõik, alates pisikestest laserninadest kuni gaaside ioonselektiivsete elektroodideni.
Kujutame ette, et need pole mitte kõik identsed, vaid pigem ansambel, kus oleks piisavalt erinevaid erinevaid andureid, mis oleks varustatud erinevat tüüpi anduritega, nii et tõenäosus oleks endiselt suur, isegi kui arvestada ühikute arvu üsna suuri kaotusi, et me oleks ikka täielik komplekt andureid. Ehkki igal üksusel ei saa olla andurite hiiglaslikku koormust, võib teil sellest piisavalt olla, et see saaks märkimisväärselt kattuda kaasüksustega.
AM: Kas on võimalik teha bioloogilisi katseid?
PB: Arvan nii. Eriti kui kujutate ette ajaraamistikku, mida me vaatame, koos edusammudega, mis on võrgus tulemas kõigega, alates kvantpunktidest kuni kiibil laborisse. Muidugi on keeruline proovimaterjali saamine neile. Kuid kui tegemist on väikeste maapealse kontaktiga üksustega, näiteks meie hüppeliste mikroobotitega, võiksite need paigutada otse materjalile, mida nad soovivad katsetada. Kombineerituna mikroskoopia ja laiema välja kujutistega on minu arvates olemas võime teha mõnda tõsist bioloogilist tööd.
AM: Kas teil on aimu, mis on need verstapostid, mida loodate oma kaheaastase projekti jooksul läbi lüüa?
PB: Eeldame, et märtsiks võib olla töötlemata prototüüpe, millel on asjakohane liikuvus. Kuid see võib olla liiga ambitsioonikas. Kui meil on mobiilsed üksused, on meie plaan teha katseid reaalsetes laavatoruga koobastes, millega me New Mexico osutame.
Põllusait on juba testitud. I etapi käigus tuli välja MIT-grupp ja õpetasin neile natuke koobastestmist ja seda, milline maastik tegelikult oli. See oli nende jaoks suur silmade avaja. MIT-i saalidele robotite kavandamine on üks asi, aga teine asi on nende kavandamine reaalse maailma kivisesse keskkonda. See oli meile kõigile väga hariv kogemus. Ma arvan, et neil on üsna hea idee, mis tingimused nad peavad oma kujundusega vastama.
AM: Mis need tingimused on?
PB: äärmiselt ebaühtlane maastik, palju lõhesid, kuhu need tüübid võivad ajutiselt kinni jääda. Seega vajame töörežiime, mis võimaldavad neil vähemalt mõistliku eduvõimaluse korral endast välja pääseda. Vaateväljasuhtluse väljakutsed väga karedal pinnal. Suurtest rändrahnudest üle saamine. Kinni jäämine väikestesse pragudesse. Selliseid asju.
Laava pole sile. Laavatorude sisemus on pärast nende moodustumist sisemiselt sile, kuid seal on palju materjali, mis kahaneb ja lõheneb ning kukub alla. Nii et ümber ja ümber on killustikuhunnikud ja palju kõrguse muutusi. Ja neid asju ei saa tavalised robotid teha.
Algne allikas: NASA Astrobiology