Tutvuge OSIRIS-RExi looga “rändrahnud”.
Kui NASA kosmoselaev üle aasta tagasi esimest korda asteroidi Bennu juurde jõudis, oli asteroidi pind oodatust palju erinev. Suurte siledate pindadega pinna asemel kaetakse rändrahnudega peaaegu kogu pind. See tähendas, et NASA pidi proovide võtmise korra uuesti läbi mõtlema.
Algselt plaanisid nad LIDARi kasutada OSIRIS-RExi (päritolu, spektritõlgendamine, ressursside tuvastamine, turvalisus, Regolith Explorer) asteroidi Bennu pinnale suunamiseks. OSIRIS-REx on proovide tagastamise missioon ja proovide kogumiseks peab see puudutama pinda.
LIDAR (Light Detection And Ranging) on navigatsioonisüsteem, mis kiirgab valguse impulsse ja loeb peegeldusi. Mõõtes impulsside tagasitulekuaega, saab see “joonistada” pildi valgust peegeldavatest objektidest. Tulemust nimetatakse punktpunktiks. Tehke seda sadu, tuhandeid, isegi miljoneid kordi ja pilt muutub üsna detailseks.
OSIRIS-RExi LIDAR-i nimetatakse juhtimis-, navigeerimis- ja juhtimisfunktsioonide (GNC) LIDAR-ks. Kuid see oli mõeldud kosmoselaeva maandumiseks maandumiskohtades, mille läbimõõt on 50 meetrit (164 jalga). Bennu saabudes oli selge, et asteroidil selliseid saite pole. Suurim sait on palju väiksem, kõigest 16 meetrit (52 jalga) lai ehk umbes 10% NASA arust seal võiks olla.

Nii et OSIRIS-RExi meeskond pidi leidma uue lahenduse. Sellise, mis võiks kosmoseaparaadi ohutult suunata palju väiksematesse proovivõtukohtadesse.
Sisestage NFT või looduslike funktsioonide jälgimine.
Looduslike omaduste jälgimine põhineb omamoodi kõrge eraldusvõimega kaamerapiltide kataloogil asteroidi Bennu pinnal asuvatest proovivõtukohtadest. Kui OSIRIS-REx mõnele saidile laskub, võrdleb ta oma kaamera reaalajas olevaid pilte oma andmebaasiga, et vältida ohte ja laskuda ohutult. NFT-süsteem lisati OSIRIS-REx missiooni varukoopiana LIDAR-i.
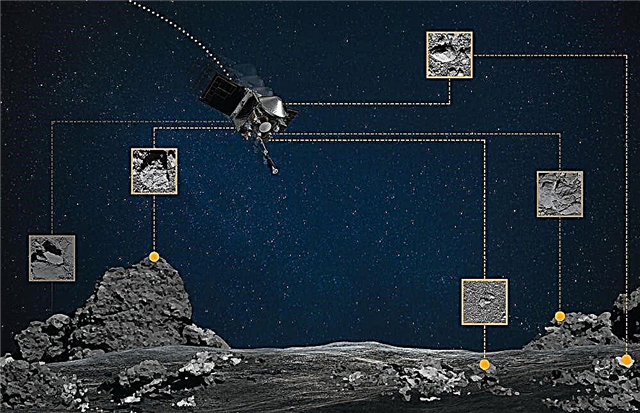
Viimase aasta jooksul on kosmoselaev läbi viinud terve rea potentsiaalsete maandumispaikade aina tihedamat lendoravat. Alguses tuvastas NASA neli potentsiaalset saiti, seejärel kitsendas selle kaheks: esikülg Nightingale; ja Osprey, varukoopia sait. Kärbsevõistluste ehk ülekandmise ajal jäädvustas kosmoseaparaat kõrge eraldusvõimega pilte saitidest, samuti lähenemistest ja lahkumistest. Kohti pildistatakse erinevate nurkade alt ja erinevates valgustingimustes, et need oleksid võimalikult täpsed.

Maa peal tagasi kasutas OSIRIS-RExi meeskond kõiki neid pilte ohtude, eriti ohtlike rändrahnude tuvastamiseks, mis asuvad esmase proovivõtukoha Nightingale ja varupaiga Osprey lähedal. Seejärel ühendasid nad need pildid OSIRIS-REx Laser Altimeter (OLA) andmetega, et luua Bennu pinna üksikasjalikud kaardid.
NASA tehnilises dokumendis kirjeldatakse NFT-d järgmiselt: „Parda renderdamiseks renderdab NFT iga funktsiooni, kasutades kuju mudeli andmeid, mis on saadud missiooni käigus varem kogutud andmetest. Iga funktsiooni tähistab maastikuandmete ja nendega seotud albedoandmete massiiv, mis vastab asteroidi pinnal olevale plaastrile. Seejärel kasutab NFT neid andmeid koos prognoositava päikesenurga ja kaamerapositsiooniga funktsiooni eeldatava väljanägemise saavutamiseks, mis sobitatakse pardal kogutud kujutisega, kasutades normaliseeritud ristkorrelatsiooni. ”

Tulemas on paar proovivõtuproovi ja OSIRIS-REx kasutab nende lähedaste lähenemiste korral NFT-d. OSIRIS-RExi meeskond jälgib NFT tõhusust ja kontrollib, kas kosmoselaev suudab vajaduse korral isegi lähenemist katkestada. Kõik juhtub automaatselt, kuna Bennu on reaalajas suhtlemiseks liiga kaugel.
Augusti lõpus proovib kosmoselaev esimest tõelist proovide kogumist. OSIRIS-Rex on varustatud mitmete proovide kogumise katsetega, kui esimene ebaõnnestub.
Kosmoseaparaat kavatseb asteroid Bennu juurest väljuda 2021. aastal ja viia proov Maale tagasi 2023. aastal.
Veel:
- Pressiteade: Bennu kivirahnud säravad NASA OSIRIS-RExi majakatena
- NASA tehniline raamat: OSIRIS-REx autonoomse navigeerimise õppetunnid loodusomaduste jälgimise abil
- Kosmoseajakiri: OSIRIS-REx lendas maandumiskoha kohal 620 meetrit kõrgemale. Kinnitab, et see on kivihunniku õudusunenägu, nagu kogu ülejäänud Bennu